Download the images from the Isidore attachment 2013_0417.zip. The images are described in photo filelist Use the first few images to calibrate the camera. Compare the focal length and camera center parameters to calibrations of the same camera from previous assignments. Use the extrinsic parameters for the first image to determine the height of the camera above the floor and the camera angles (relative to the back wall and floor).
Calibration results (with uncertainties): Focal Length: fc = [ 2604.37528 2514.93367 ] ± [ 85.95402 89.08338 ] Principal point: cc = [ 1056.53227 1113.06817 ] ± [ 89.94832 121.33121 ] Skew: alpha_c = [ 0.00000 ] ± [ 0.00000 ] => angle of pixel axes = 90.00000 ± 0.00000 degrees Distortion: kc = [ -0.44746 1.30320 -0.03704 0.00216 0.00000 ] ± [ 0.15745 0.97763 0.01303 0.00714 0.00000 ] Pixel error: err = [ 1.20452 1.18617 ] Note: The numerical errors are approximately three times the standard deviations (for reference).
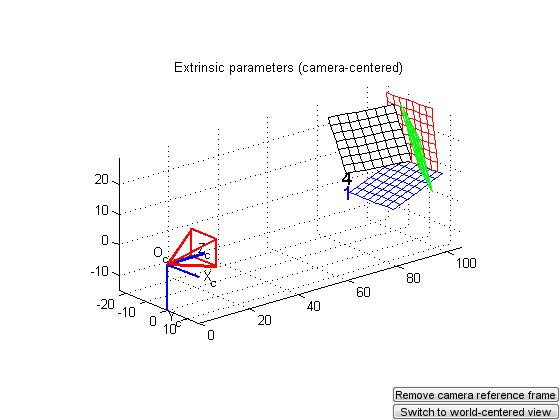
See MATLAB analysis of extrinsic parameters script3.m
Maintained by John Loomis, last updated 14 May 2012