function xp = project_points_small(X,om,T,f,c,k,alpha)
f = fc; c = cc; k = kc; alpha = alpha_c; %project_points2.m % % xp = project_points2(X,om,T,f,c,k,alpha) % %Projects a 3D structure onto the image plane. % %INPUT: X: 3D structure in the world coordinate frame (3xN matrix for N points) % (om,T): Rigid motion parameters between world coordinate frame and camera reference frame % om: rotation vector (3x1 vector); T: translation vector (3x1 vector) % f: camera focal length in units of horizontal and vertical pixel units (2x1 vector) % c: principal point location in pixel units (2x1 vector) % k: Distortion coefficients (radial and tangential) (4x1 vector) % alpha: Skew coefficient between x and y pixel (alpha = 0 <=> square pixels) % %OUTPUT: xp: Projected pixel coordinates (2xN matrix for N points) % %Definitions: %Let P be a point in 3D of coordinates X in the world reference frame (stored in the matrix X) %The coordinate vector of P in the camera reference frame is: Xc = R*X + T %where R is the rotation matrix corresponding to the rotation vector om: R = rodrigues(om); %call x, y and z the 3 coordinates of Xc: x = Xc(1); y = Xc(2); z = Xc(3); %The pinehole projection coordinates of P is [a;b] where a=x/z and b=y/z. %call r^2 = a^2 + b^2. %The distorted point coordinates are: xd = [xx;yy] where: % %xx = a * (1 + kc(1)*r^2 + kc(2)*r^4 + kc(5)*r^6) + 2*kc(3)*a*b + kc(4)*(r^2 + 2*a^2); %yy = b * (1 + kc(1)*r^2 + kc(2)*r^4 + kc(5)*r^6) + kc(3)*(r^2 + 2*b^2) + 2*kc(4)*a*b; % %The left terms correspond to radial distortion (6th degree), the right terms correspond to tangential distortion % %Finally, convertion into pixel coordinates: The final pixel coordinates vector xp=[xxp;yyp] where: % %xxp = f(1)*(xx + alpha*yy) + c(1) %yyp = f(2)*yy + c(2) % % %NOTE: About 90 percent of the code takes care fo computing the Jacobian matrices % % %Important function called within that program: % %rodrigues.m: Computes the rotation matrix corresponding to a rotation vector % %rigid_motion.m: Computes the rigid motion transformation of a given structure
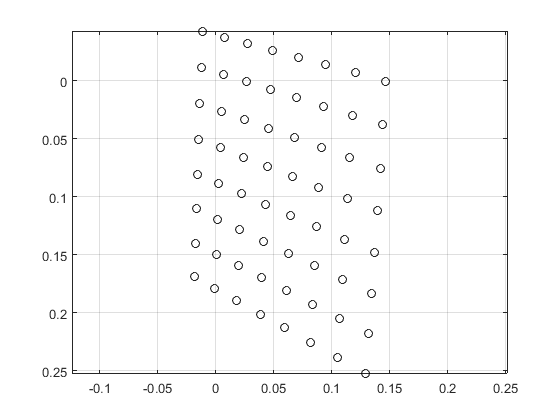
[~,n] = size(X); Y = rigid_motion(X,om,T); inv_Z = 1./Y(3,:); x = (Y(1:2,:) .* (ones(2,1) * inv_Z)) ; plot(x(1,:),x(2,:),'ko'); grid axis equal axis ij
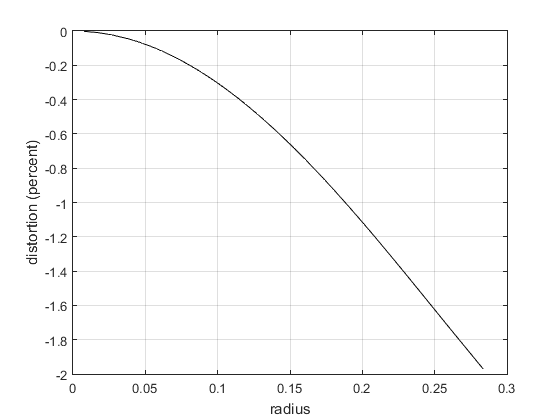
% Add distortion: r2 = x(1,:).^2 + x(2,:).^2; r4 = r2.^2; r6 = r2.^3; % Radial distortion: cdist = 1 + k(1) * r2 + k(2) * r4 + k(5) * r6; [r ndx] =sort(sqrt(r2)); figure plot(r,(cdist(ndx)-1)*100,'k'); grid xlabel('radius'); ylabel('distortion (percent)'); xd1 = x .* (ones(2,1)*cdist);
% tangential distortion:
a1 = 2.*x(1,:).*x(2,:);
a2 = r2 + 2*x(1,:).^2;
a3 = r2 + 2*x(2,:).^2;
delta_x = [k(3)*a1 + k(4)*a2 ;
k(3) * a3 + k(4)*a1];
xd2 = xd1 + delta_x;
Add Skew:
xd3 = [xd2(1,:) + alpha*xd2(2,:) ; xd2(2,:)];
Pixel coordinates:
if length(f)>1, xp = xd3 .* (f(:) * ones(1,n)) + c(:)*ones(1,n); else xp = f * xd3 + c*ones(1,n); end;
maximum error
fprintf('maximum diff from Bouguet: %g %g\n',max(abs(xp-y_kk)'));
maximum diff from Bouguet: 0 0