ECE 564 Computer Vision Assignment 2
Submit HTML documentation on Isidore.
Download images from Isidore resources (CV2020-01-23.zip)
- Find the width and height of the large square in
2018-03-06_12-25-00.JPG using
manual methods to locate the corners. Find the corners using MATLAB corner(IMG,METHOD) where
'Harris' : The Harris corner detector. This is the default METHOD.
'MinimumEigenvalue' : Shi & Tomasi's minimum eigenvalue method.
and compare to the corner locations found manually.
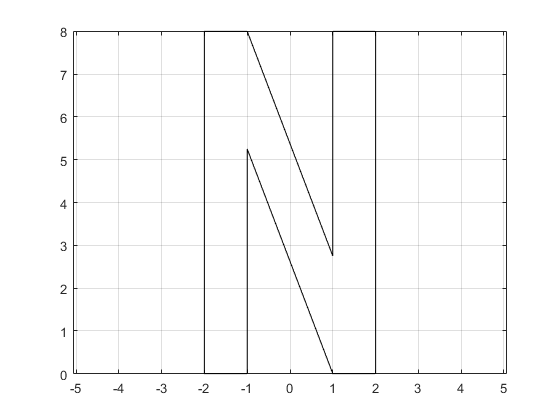
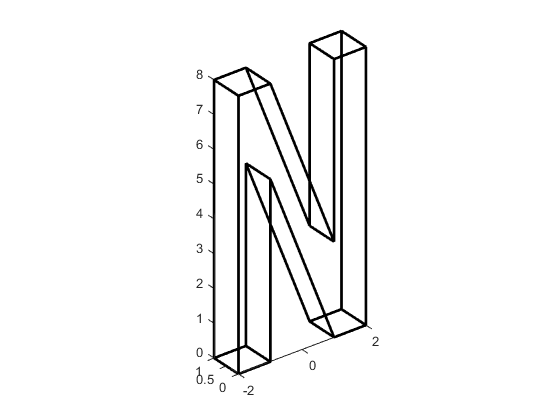
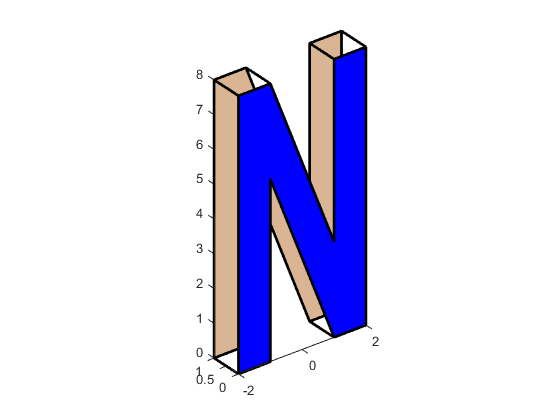
- Write a MATLAB script to generate a 3D model of the letter assigned to you. Below is my version of the letter 'N'
- Construct a cube model, preferably including your picture on one of the
faces. See example surface demo 2
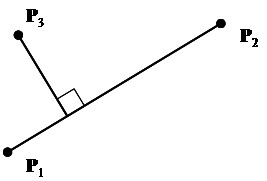
- Write a MATLAB script that uses
ginput to get
three arbitrary points and then produces the diagram shown below. As
an extra challenge, superimpose this figure over an underlying image,
using color to make the annotation stand out. Use axis equal to
insure the same scale in both x and y directions.
- Given three arbitrary 3D points, write a MATLAB script that
calculates the unit normal vector to the plane determined by those
points. The vector should be oriented by the right-hand rule. If your
fingers curl from point 1 to point 2 to point 3, then your thumb
should point in the direction of the normal vector.
- Use the three hallway images provided. Find the efl for each of the images (camera was zoomed from one image to the next).
Manually determine the edges of the floor and ceiling and locate the vanishing point for each image. Extend your lines through the
vanishing point and enlarge the image to show how well the four lines converge.
Maintained by John Loomis,
last updated 4 Feb 2019