ECE 564 Computer Vision Assignment 3
Submit HTML documentation and MATLAB files on Isidore.
- Using images from Isidore resources (
CV2020-01-30.zip), find the effective focal length of the camera and the horizontal field of view.
See calculating focal length.
- Assume a target point of [2, 4, 8], a camera location of [1, 0, 20], and
an up vector of [0 0 1]. Find the matrix that converts world coordinates to
camera coordinates. You should do this by hand (using MATLAB to do the work) and
then by using the MATLAB camera specifications.
- Set the MATLAB camera parameters to show trimetric, dimetric, and isometric
projections of the cube from last assignment. Measure the lengths of the sides to
verify the projections, calculate the relative foreshortening ratios, and compare the
measurements to your calculations.
- Generate a photo montage showing various views of the cube from the last assignment.
Include several views showing the effect of perspective
projection with the camera angle varying from large (maybe 60-degrees to
small 10-degrees).
- Scan the faces of some boxed product and generate and accurate model of that box.
Your published MATLAB should include views showing all sides of the box.
Bring the box to show in class or send me a photo to ensure there are no duplicates.
Save the box for use later in the semester. Make the dimensions match those of the original box.
Note that for successful texture mapping, the size of the texture images must not be too large.
See Raisin Bran box
example.
- Using image2.jpg from Isidore resources (
CV2018data.zip),
do the following
- Find the vanishing points from the checkerboard. Expand the image to show
the vanishing points as shown below. Then expand the region about the vanishing point
to show how well the lines converge.

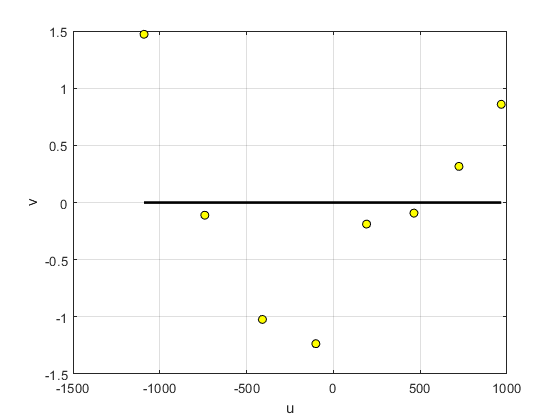
- Choose a single checkerboard line, fit the line that minimizes the perpendicular
deviations and plot the results as shown below
Maintained by John Loomis,
last updated 1 February 2020