Given the extrinsics from the MATLAB camera calibrator. R and T
are the distance and orientation of the target coordinate system relative to the camera and in camera coordinates.
We want the distance and orientation of the camera coordinate system relative to the target and in target coordinates.
k = 4; location = -T(k,:)*R(:,:,k)'/12
The location was converted from inches to feet. The camera calibrator was told that the checker square size was 3 inches.
location = 1.9881 12.6505 -9.5675
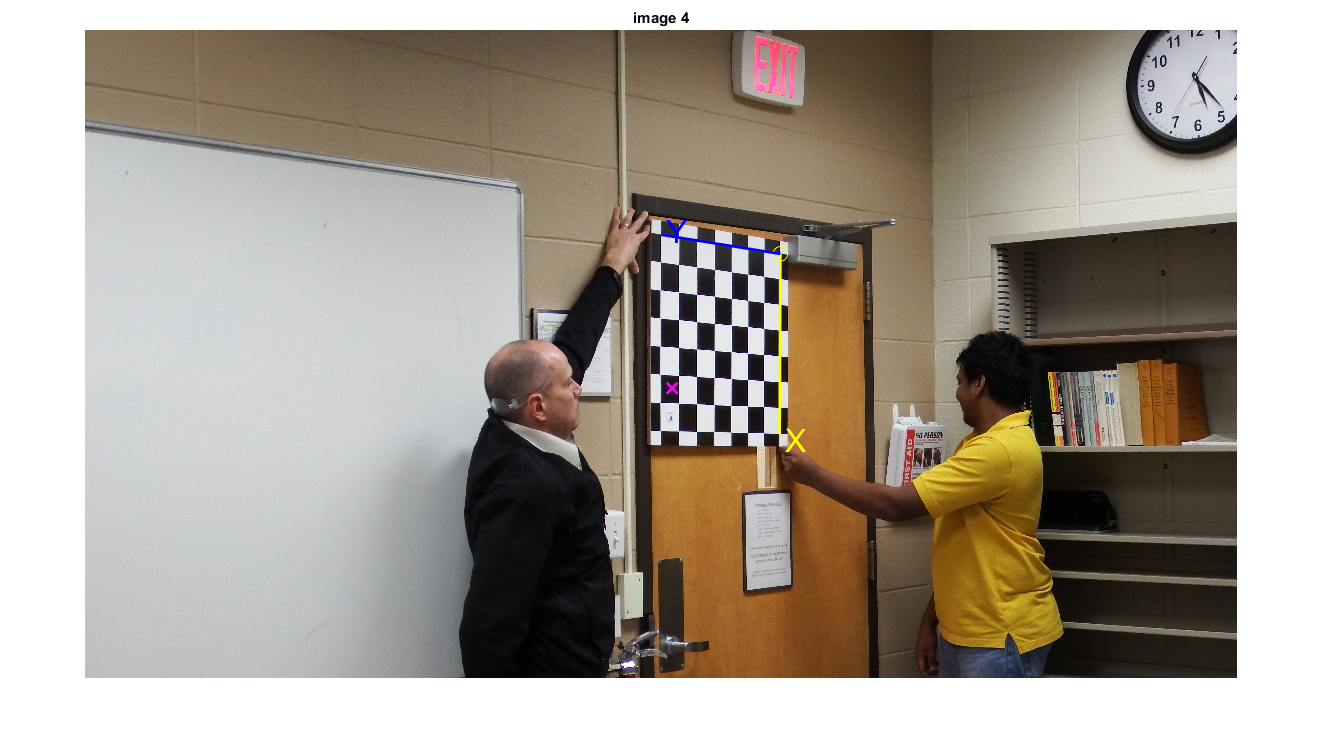
The magneta marker notes the camera center (from intrinsics matrix)
Maintained by John Loomis, last updated 14 February 2017