ECE 564 Computer Vision Assignment 6
Submit the usual HTML documentation and source code on Isidore.
Use the photographs from CV2020-02-05 and CV2020-02-24.
See also studies of camera pose.
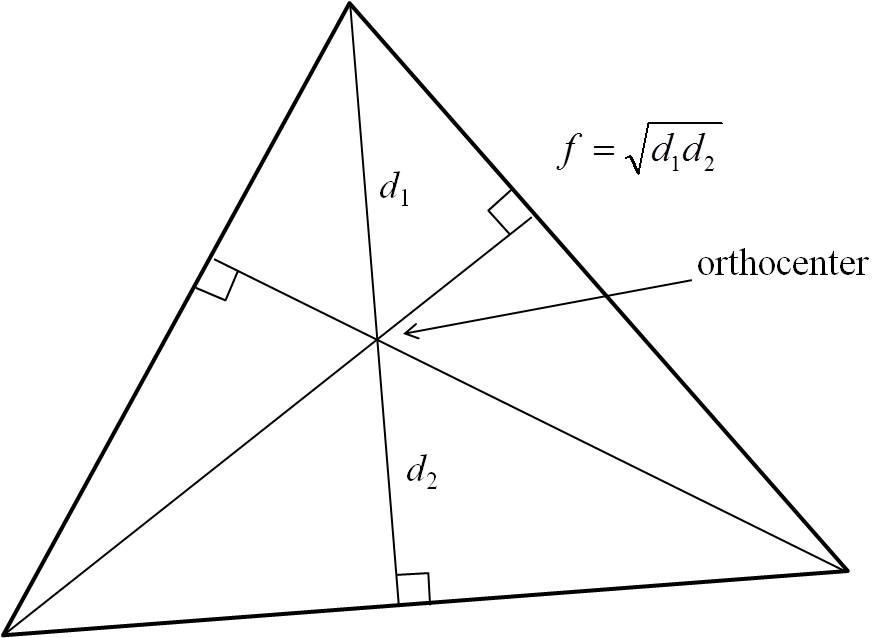
- Given a triangle represented by three principal vanishing points, write a MATLAB code to determine
the orthocenter and distances d1 and d2 for each vertex. Check
that the focal length formula gives the same result for each case.
- Write a MATLAB function to determine the Euler line of a triangle. Demonstrate that
the three centers do in fact lie on the Euler line (see references)
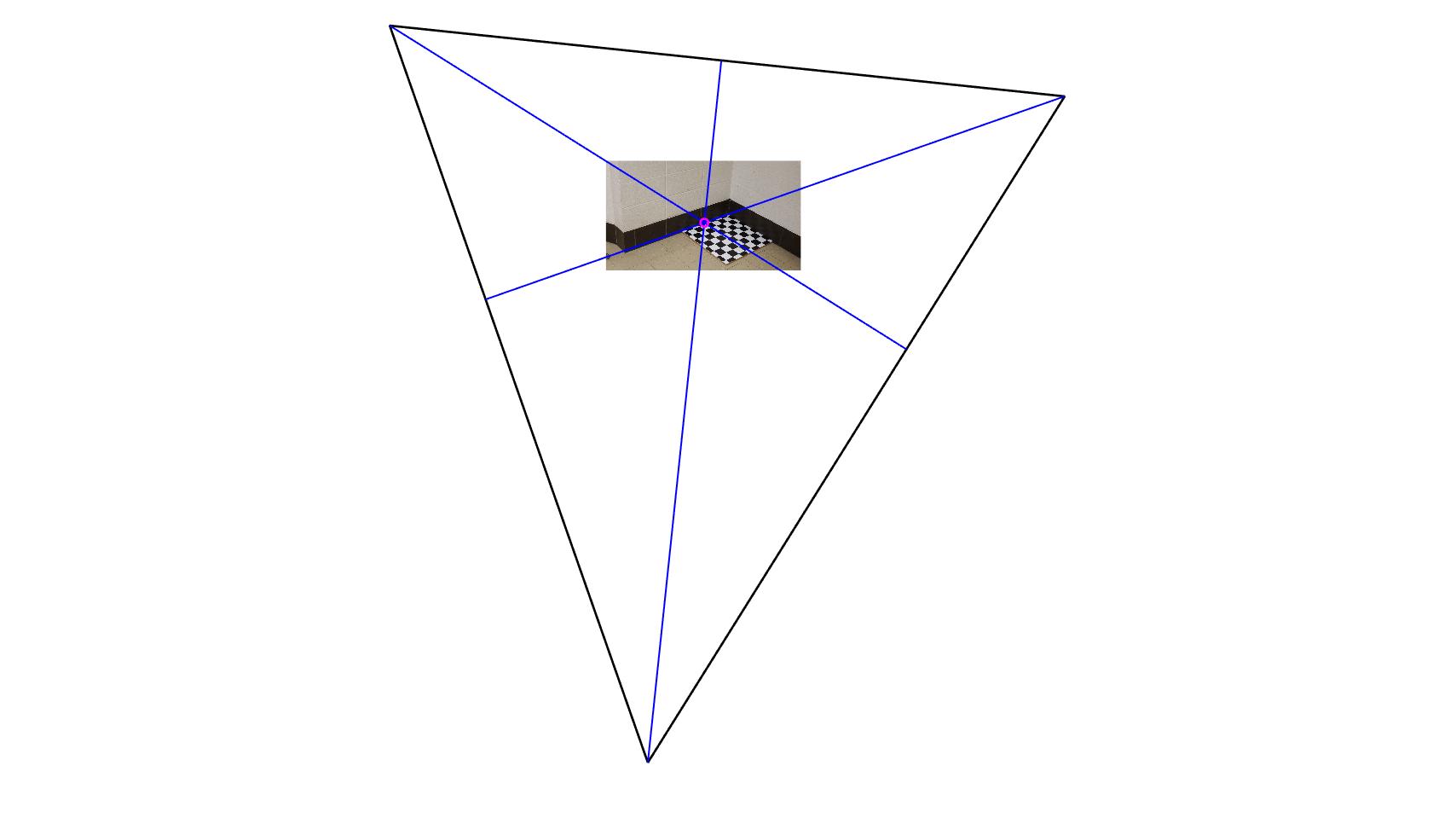
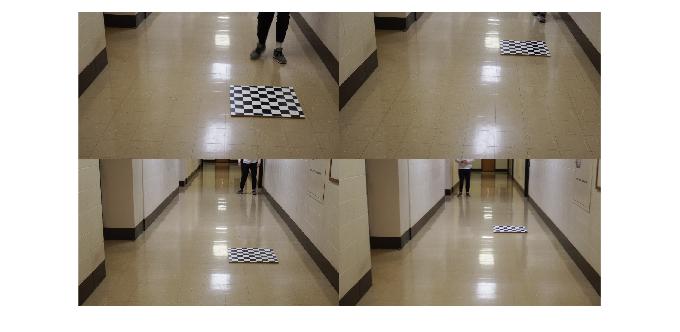
- Use CV2020-02-05 showing the target board on floor, right-wall, and left-wall.
- Find the three principal horizon lines and construct
an “ortho triangle” to determine the orthocenter
(principal point) and focal length of the camera. Compare to the MATLAB camera calibration you
performed in an earlier assignment.
-
Construct a diagram similar to the example below.
- Use the first hall image from CV2020_05_24 (see below) and camera calibration data obtained earlier to find the
the location of the camera and checkerboard
relative to the hallway. Find the height of the camera above the floor.
Calculate the “look-down” angles of the camera.
Use the photographs taken of the camera to obtain another measure of the “look-down” angle.
- Construct a
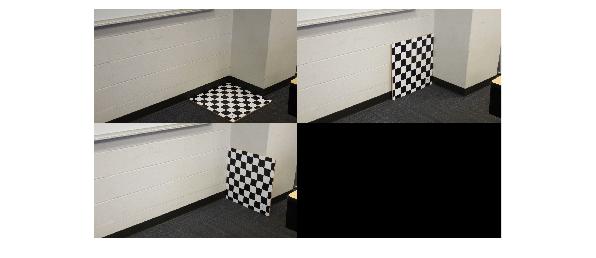
tform to show a top-view of the hallway from the top-left image above.
Use the same tform to warp the other images. Does the checkerboard look square in these
other images?
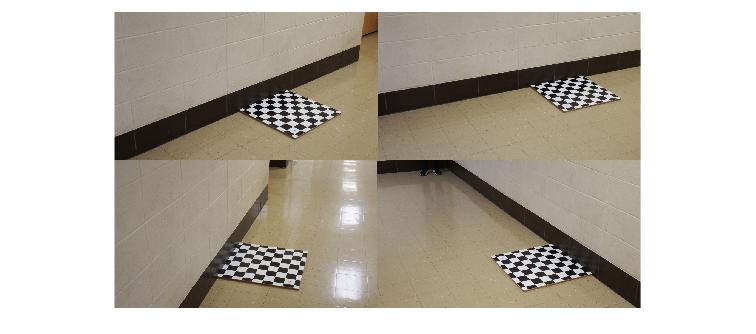
- Use the same
tform for the images below. If the tform is inapproriate, generate
a new one from the top-level image below. Calculate the width of the hallway and the divergence angle of the hallway.
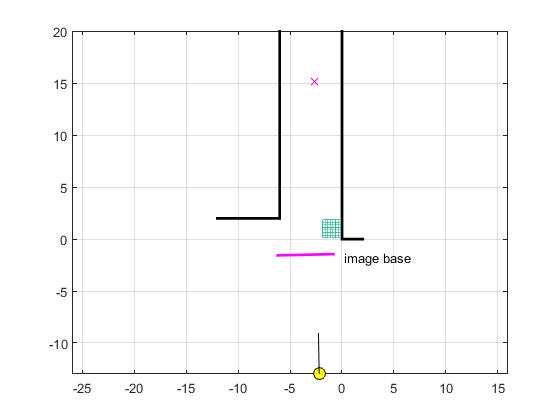
- Construct a layout drawing similar to the one shown below,
showing the geometry of the hallway, the position and orientation of the camera and the bottom of the
camera field of view. The asterisk shows the camera target point (projection of camera z-axis to the
transformed image).
References
Orthocenter of a triangle (Wikipedia)
Orthocenter (with animation)
(Math Open Reference)
Euler line (Wikipedia)
Euler line (Math Open Reference)