ECE 564 Computer Vision Assignment 9
Submit HTML documentation and MATLAB code on Isidore.
- Experiment with feature detection methods, using your stereo images. Try all of the methods
defined in the Computer Vision toolbox, and compare the results.
See MATLAB showMatchedFeatures
and MATLAB Feature Detection
and Extraction and feature overview
- Use the original street image (small version shown) and the dimensions of a Stop sign to locate the
distance of the camera from the stop sign, and the distance from the camera to the telephone pole on the left.

- Use the same street image and directed holography to produce a view of the street as seen from above,
that is with parallel street edges.
- Choose two images of the same house, find matching points, generate the essential matrix, and use that
to obtain 3D points relative to one of the camera positions.
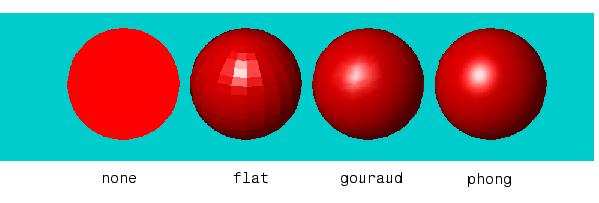
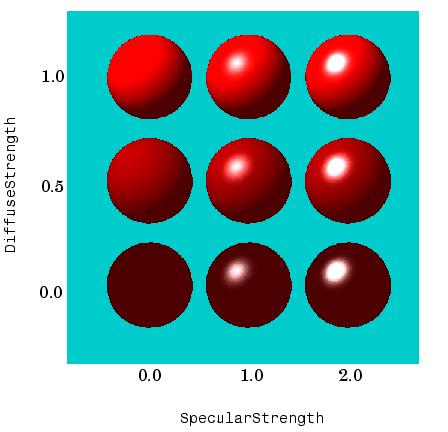
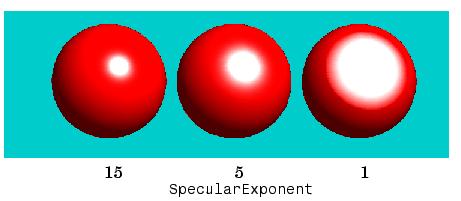
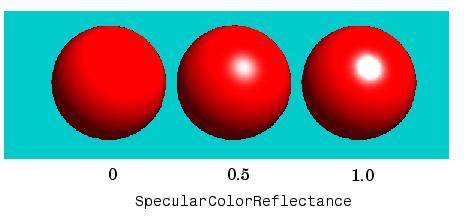
- Write MATLAB programs to reproduce the figures below
- Shading examples using lighting
- Variations of diffuse and specular reflection
- Varying the SpecularExponent
- Varying the SpecularColorReflectance
- Create an image of the target checkerboard and your product illuminated by a
directional or point source. Select material parameters to show specular highlights
reflecting from the checkerboard.
Maintained by John Loomis,
last updated 16 April 2019