hallway4
clear, close all
pts = [ 0 0 0; 0 100 0; 10 0 0; 10 100 0];
N = 4;
hpts = [pts ones(N,1)];
up = [0 0 1];
cam.pos = [5 -10 2];
cam.target = [5 20 0];
cam = cam_obj(cam);
T = cam.T
T =
1.0000 0 0 -5.0000
0 0.0665 0.9978 -1.3304
0 0.9978 -0.0665 10.1109
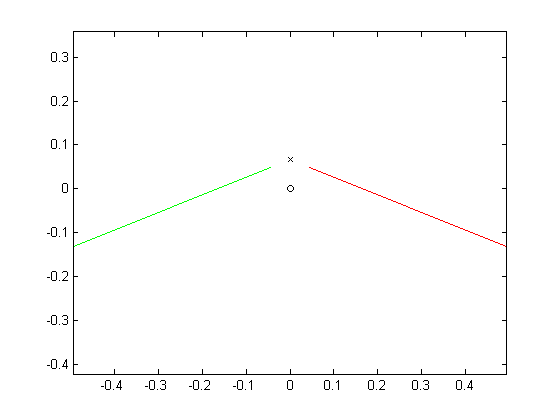
[imgpt invpt] = cam_plot(cam,pts);
plot(imgpt(1:2,1),imgpt(1:2,2),'g');
hold on;
plot(imgpt(3:4,1),imgpt(3:4,2),'r');
plot(0,0,'ko','MarkerSize',5);
hold off
axis equal
vp = intersect(imgpt(1:2,:),imgpt(3:4,:),'kx')
vpx = T(1,2)/T(3,2)
vpy = T(2,2)/T(3,2)
vp =
0.0000 0.0667
vpx =
0
vpy =
0.0667
pn = [0 0 1 0];
pos = [cam.pos 1];
for m=1:4
k = invpt(m,:)-cam.pos;
q = -(pn*pos')/(pn(1:3)*k');
pt = cam.pos + q*k;
pt
end
pt =
1.0e-014 *
-0.2665 0.5329 0
pt =
0.0000 100.0000 0
pt =
10.0000 0.0000 0
pt =
10.0000 100.0000 0
Tinv = [cam.Tinv; 0 0 0 1];
pw = [0 0 1 0];
pn = pw*Tinv
for m=1:4
k = [imgpt(m,:) 1];
q = -pn(4)/(pn(1:3)*k');
pt = q*k;
cam.Tinv*[pt 1]'
end
pn =
0 0.9978 -0.0665 2.0000
ans =
1.0e-014 *
0
-0.1776
0.0222
ans =
0
100.0000
0
ans =
10.0000
-0.0000
0.0000
ans =
10.0000
100.0000
0
d = -pn(4);
M = [d 0 0 0; 0 d 0 0; 0 0 d 0; pn(1:3) 0];
Tx = Tinv*M;
for m=1:4
k = [imgpt(m,:) 1 1];
pth = Tx*k';
pt(1:3) = pth(1:3)./pth(4);
pt
end
Tx
pt =
1.0e-015 *
-0.5613 0 0
pt =
0.0000 100.0000 0
pt =
10 0 0
pt =
10.0000 100.0000 0
Tx =
-2.0000 4.9889 -0.3326 0
0 -10.1109 -1.3304 0
0 0 0 0
0 0.9978 -0.0665 0
N = 4;
k = [imgpt ones(N,2)];
pth = k*Tx';
pt = pth(:,1:3)./repmat(pth(:,4),[1 3])
pt =
-0.0000 0 0
0.0000 100.0000 0
10.0000 0 0
10.0000 100.0000 0
base_points = pts(:,1:2);
Tf = cp2tform(imgpt,base_points,'Projective');
Tf.tdata.T
ans =
10.1109 0 0
-25.2212 51.1150 -5.0442
1.6814 6.7257 0.3363
out = [imgpt ones(4,1)]*Tf.tdata.T;
out = out(:,1:2)./[out(:,3) out(:,3)]
Tn = Tx';
scl = Tf.tdata.T(3,3)/Tn(3,4)
Tm = Tn*scl;
Tm = Tm(1:3,[1 2 4])
test = max(max(abs(Tm-Tf.tdata.T)))
out =
-0.0000 -0.0000
-0.0000 100.0000
10.0000 -0.0000
10.0000 100.0000
scl =
-5.0554
Tm =
10.1109 0 0
-25.2212 51.1150 -5.0442
1.6814 6.7257 0.3363
test =
1.4211e-014
close all
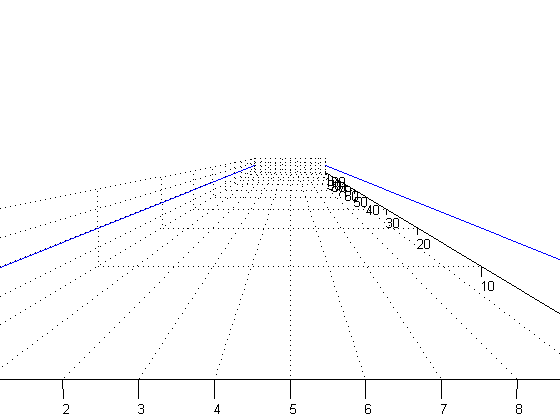
plot3(hpts(1:2,1),hpts(1:2,2),hpts(1:2,3));
hold on
plot3(hpts(3:4,1),hpts(3:4,2),hpts(3:4,3));
camproj('Perspective');
campos(cam.pos);
camtarget(cam.target);
camva(25);
daspect([1 1 1]);
axis equal
grid
hold off
Tx = view
XLim = get(gca,'XLim')
YLim = get(gca,'YLim')
ZLim = get(gca,'ZLim')
Tx =
0.1000 0 0 -0.0500
0 0.0665 0.0998 -0.0632
0 0.9978 -0.0067 0.1044
0 0 0 1.0000
XLim =
0 10
YLim =
0 100
ZLim =
-5 5