hallway5
clear, close all
w = 10;
d = 100;
pts = [ 0 0 0; 0 d 0; w 0 0; w d 0];
N = 4;
hpts = [pts ones(N,1)];
cam.pos = [5 -10 2];
cam.target = [5 20 0];
cam = cam_obj(cam);
T = cam.T
T =
1.0000 0 0 -5.0000
0 0.0665 0.9978 -1.3304
0 0.9978 -0.0665 10.1109
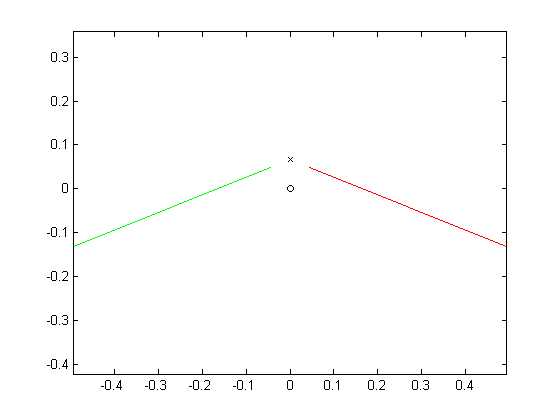
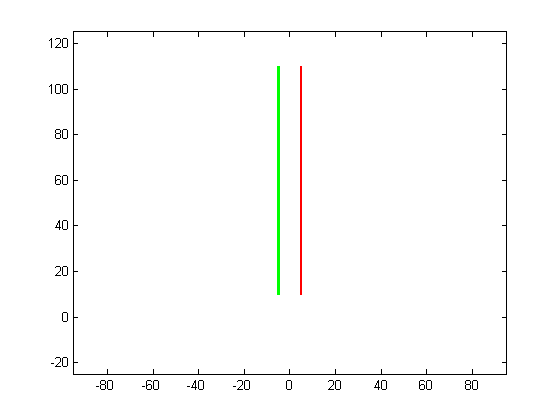
[imgpt invpt] = cam_plot(cam,pts);
plot(imgpt(1:2,1),imgpt(1:2,2),'g');
hold on;
plot(imgpt(3:4,1),imgpt(3:4,2),'r');
plot(0,0,'ko','MarkerSize',5);
hold off
axis equal
vpy = intersect(imgpt(1:2,:),imgpt(3:4,:),'kx')
vpx = [Inf NaN];
p = [vpx; vpy];
vpy =
0.0000 0.0667
pn = [0 0 1 0];
Tinv = [cam.Tinv; 0 0 0 1];
Tinv(1:2,4)=0.0;
Tinv(3,4)=2;
pw = [0 0 1 0];
pn = pw*Tinv
d = -pn(4);
M = [d 0 0 0; 0 d 0 0; 0 0 d 0; pn(1:3) 0];
Tx = Tinv*M;
N = 4;
k = [imgpt ones(N,2)];
pth = k*Tx';
pto = pth(:,1:3)./repmat(pth(:,4),[1 3])
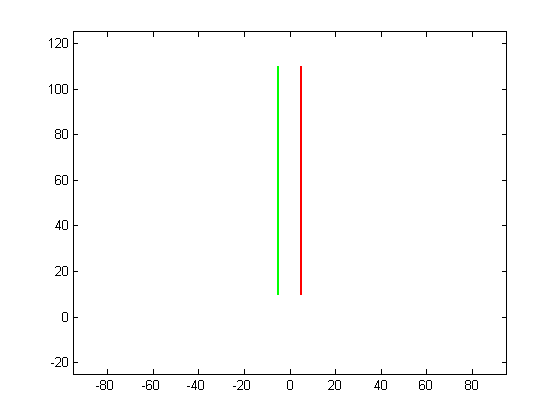
draw5(pto)
pn =
0 0.9978 -0.0665 2.0000
pto =
-5.0000 10.0000 0
-5.0000 110.0000 0
5.0000 10.0000 0
5.0000 110.0000 0
v = [0 -5 0 -2];
[vfit fmin exitflag options] = fminsearch(@fval2,v,[],p)
Exiting: Maximum number of function evaluations has been exceeded
- increase MaxFunEvals option.
Current function value: 0.000000
vfit =
0.0029 -4.6139 0.0016 0.8261
fmin =
1.8262e-009
exitflag =
0
options =
iterations: 482
funcCount: 801
algorithm: 'Nelder-Mead simplex direct search'
message: [1x149 char]
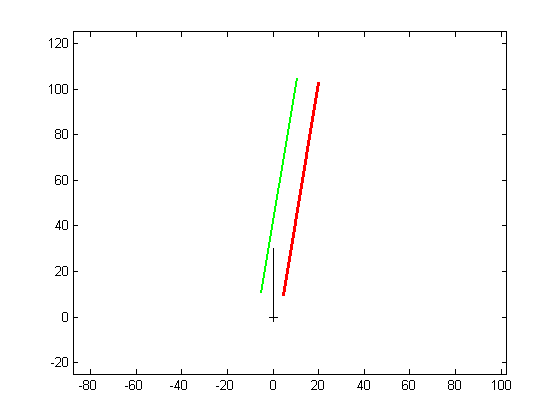
pto = back_projection(vfit,imgpt);
draw5(pto);
v = [0 -5 0 -2];
[vfit fmin exitflag options] = fminsearch(@fval3,v,[],imgpt)
vfit =
0.0005 -3.8141 0.0002 -2.0000
fmin =
2.4299e-005
exitflag =
1
options =
iterations: 65
funcCount: 119
algorithm: 'Nelder-Mead simplex direct search'
message: [1x196 char]
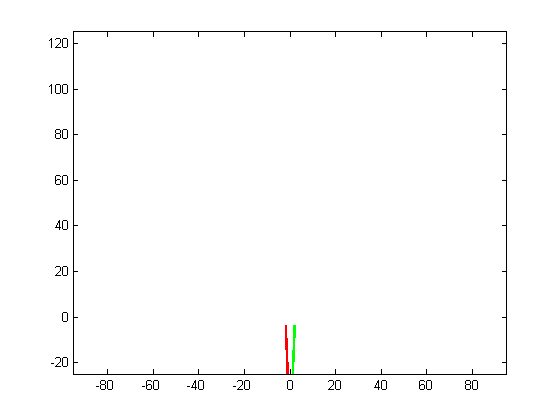
[pto Tn pn] = back_projection(vfit,imgpt);
draw5(pto);
[y q] = fval3(vfit,imgpt)
y =
2.4299e-005
q =
0.0001 -0.0002 0.0005 0.0049 -0.0001
cam2.pos = [7 -10 2];
cam2.target = [2 20 0];
cam2 = cam_obj(cam2);
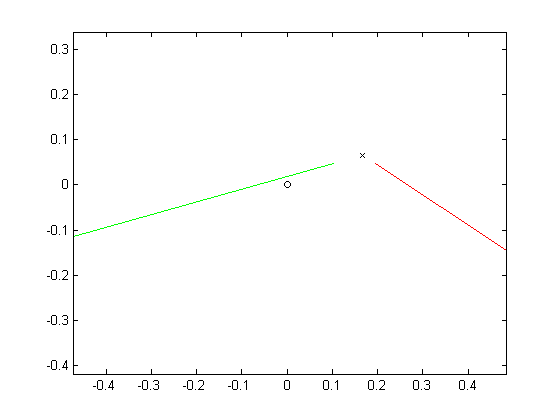
imgpt2 = cam_plot(cam2,pts);
plot(imgpt2(1:2,1),imgpt2(1:2,2),'g');
hold on;
plot(imgpt2(3:4,1),imgpt2(3:4,2),'r');
plot(0,0,'ko','MarkerSize',5);
hold off
axis equal
vpy = intersect(imgpt2(1:2,:),imgpt2(3:4,:),'kx')
vpy =
0.1670 0.0658
pto = back_projection(vfit,imgpt2);
draw5(pto);
ptc = back_projection(vfit,[0 0]);
hold on
plot(0,0,'k+');
plot([0 ptc(:,1)],[0 ptc(:,2)],'k');
hold off