orientation
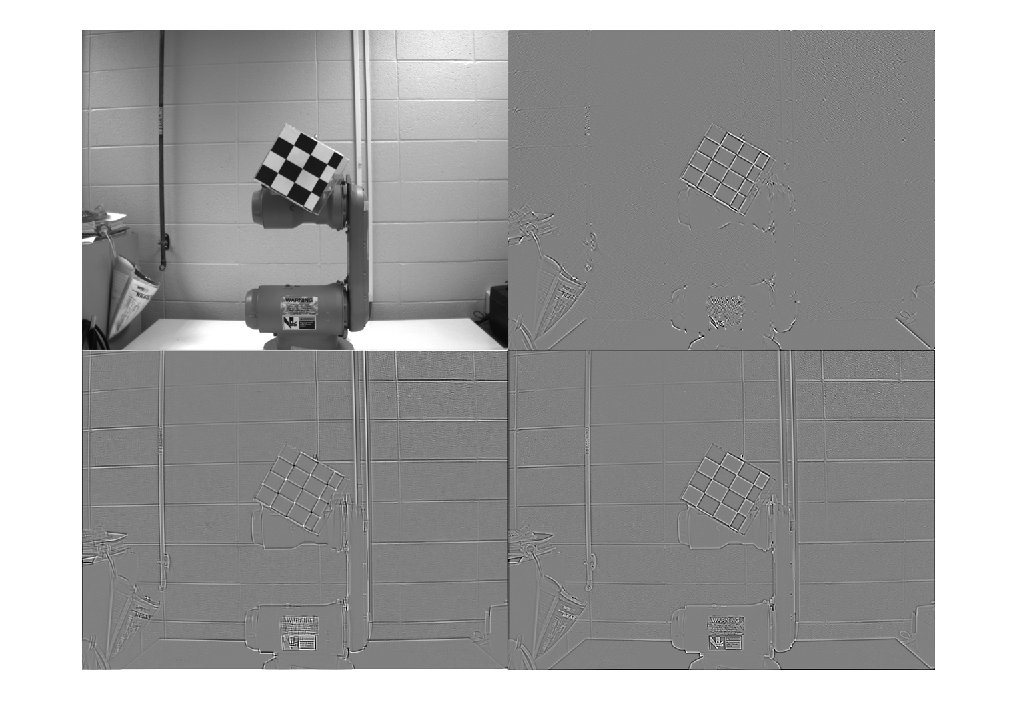
h = filters2(); h0 = h(:,:,1); h1 = h(:,:,2); h2 = h(:,:,3); h11 = h(:,:,4); h22 = h(:,:,5); h12 = h(:,:,6); hr = h11+h22; hc = h11-h22; hs = 2*h12;
bc = imfilter(img,hc); bs = imfilter(img,hs); br = imfilter(img,hr);
sz = size(img); data = zeros(2*sz(1),2*sz(2)); xd = 1:sz(1); yd = 1:sz(2); data(xd,yd)=img; data(sz(1)+xd,yd)=bp2(bc,1,2); data(xd,sz(2)+yd)=bp2(bs,1,2); data(sz(1)+xd,sz(2)+yd) = bp2(br,1,2); imshow(imresize(data,0.5))
Warning: Image is too big to fit on screen; displaying at 67%
theta = linspace(0,180,91); N = length(theta); v = zeros(size(theta)); RECT3 =[ 488 278 357 306]; for j=1:N angle = theta(j)*pi/180; c = cos(angle); s = sin(angle); g = abs(bs*c-bc*s); g2 = imcrop(g,RECT3); v(j) = max(max(g2)); end plot(theta,v);
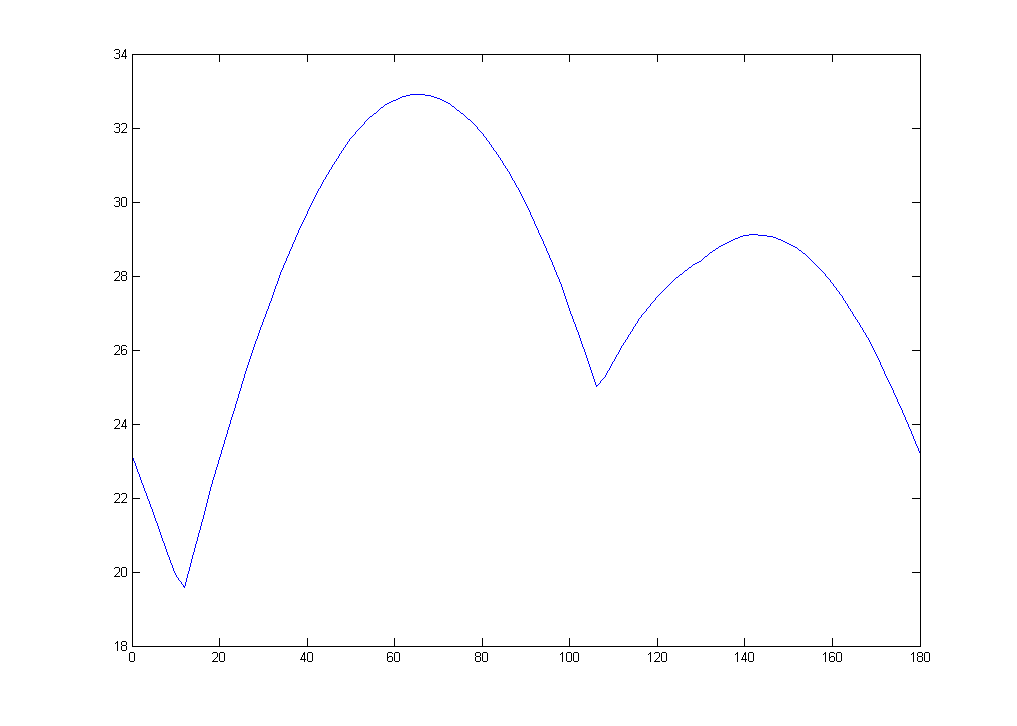
close all [vs idx] = sort(v,'descend'); k = idx(1); angle = theta(k)*pi/180; fprintf('angle %g\n',theta(k)); if npic==6 angle = 0; end c = cos(angle); s = sin(angle); g = abs(bs*c-bc*s); g2 = imcrop(g,RECT3); gmax = max(max(g2)); fprintf('gmax %g\n',gmax); gn = g2/gmax; imshow(gn);
angle 66 gmax 32.9026
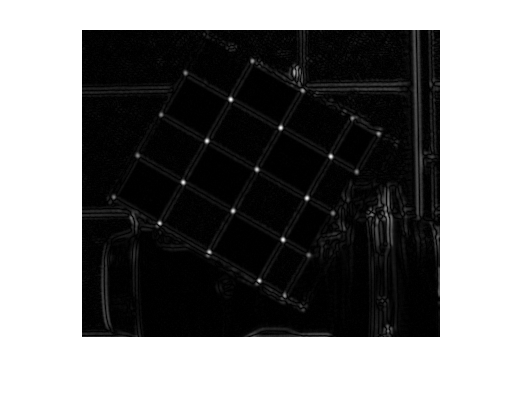
thres = 0.77; imshow(gn>thres);
sz = size(gn); x = ones(sz(1),1)*(1:sz(2)); y = (1:sz(1))'*ones(1,sz(2)); gt = gn(:); x = x(:); y = y(:); idx = find(gt>thres); xpts = x(idx); ypts = y(idx); plot(xpts,ypts,'ko'); axis ij axis square
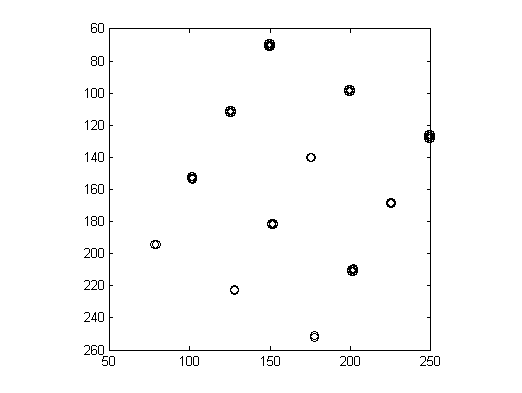
sort vertices
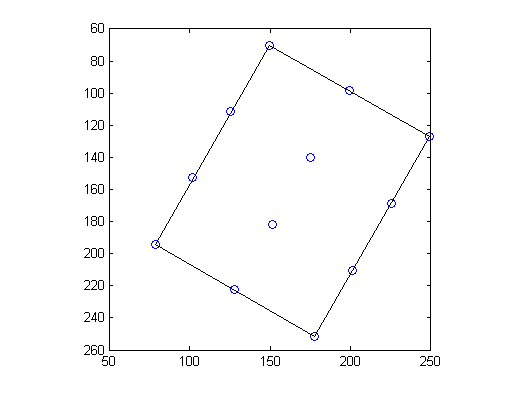
k = 0; xw = xpts; yw = ypts; xc = xpts; yc = ypts; while ~isempty(xw) test = (xw-xw(1)).^2+(yw-yw(1)).^2; [tsort idx] = sort(test); xw = xw(idx); yw = yw(idx); idx = find(tsort<64); k = k + 1; xc(k) = mean(xw(idx)); yc(k) = mean(yw(idx)); idx = find(tsort>64); % k % idx' xw = xw(idx); yw = yw(idx); end xc = xc(1:k); yc = yc(1:k); plot(xc,yc,'o'); axis ij axis square; [xleft ileft] = min(xc); [xright iright] = max(xc); [ytop itop] = max(yc); [ybot ibot] = min(yc); if npic==6 u = xc - yc; v = xc + yc; [xleft ileft] = min(u); [xright iright] = max(u); [ytop itop] = max(v); [ybot ibot] = min(v); end xp = [ xc(ileft) xc(itop) xc(iright) xc(ibot) xc(ileft)]; yp = [ yc(ileft) yc(itop) yc(iright) yc(ibot) yc(ileft)]; hold on plot(xp,yp,'k-'); hold off
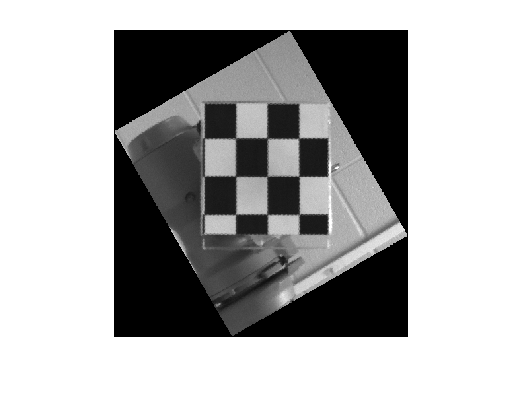
i2 = imcrop(img,RECT3); imshow(i2); hold on plot(xp(1:4),yp(1:4),'b-','LineWidth',2); plot(xp(1),yp(1),'ro','MarkerSize',10); hold off phi = atan2(yp(2)-yp(3),xp(3)-xp(2))*180/pi
phi = 60.1314
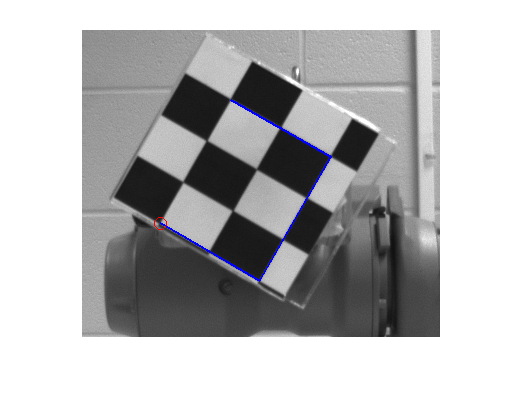
imshow(imrotate(i2,-phi));