autoPub2
Contents
close all
clear
load board1
imageFileNames = board.FullPathNames;
imagePoints = board.BoardPoints;
boardSize = board.BoardSize;
squareSize = board.SquareSize;
worldPoints = board.WorldPoints;
ImageSize = board.ImageSize;
explore image
filename = '2012_0524_1.JPG';
[impts, bsize, used] = detectCheckerboardPoints(filename);
bsize
Warning: The checkerboard must be asymmetric: one side should be even, and
the other should be odd. Otherwise, the orientation of the board may be
detected incorrectly.
bsize =
9 9
show results
I = imread(filename);
scl = 0.6;
imshow(imresize(I,scl));
hold on
plot(scl*(impts(:,1)-0.5)+0.5,scl*(impts(:,2)-0.5)+0.5,'bo','MarkerSize',7,'LineWidth',2);
hold off
Warning: Image is too big to fit on screen; displaying at 67%

[cameraParams, imagesUsed, estimationErrors] = estimateCameraParameters(imagePoints, worldPoints, ...
'EstimateSkew', false, 'EstimateTangentialDistortion', false, ...
'NumRadialDistortionCoefficients', 2, 'WorldUnits', 'inches', ...
'InitialIntrinsicMatrix', [], 'InitialRadialDistortion', [], ...
'ImageSize', ImageSize);
displayErrors(estimationErrors, cameraParams);
Standard Errors of Estimated Camera Parameters
----------------------------------------------
Intrinsics
----------
Focal length (pixels): [ 2524.6825 +/- 4.3166 2518.1892 +/- 4.4630 ]
Principal point (pixels):[ 1017.3758 +/- 3.7191 843.3565 +/- 4.8709 ]
Radial distortion: [ -0.1903 +/- 0.0098 0.5643 +/- 0.0699 ]
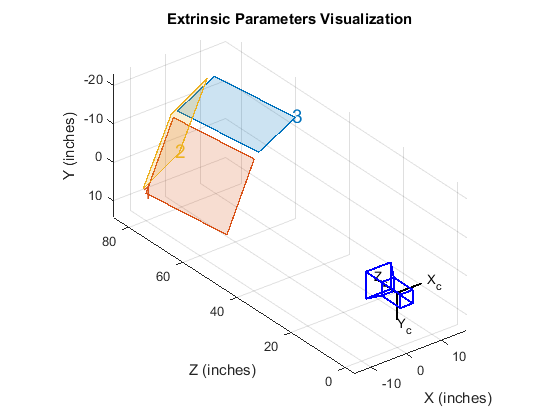
Extrinsics
----------
Rotation vectors:
[ -0.8013 +/- 0.0024 -0.2965 +/- 0.0018 -0.6899 +/- 0.0006 ]
[ 0.6803 +/- 0.0019 -0.6779 +/- 0.0019 -0.2725 +/- 0.0008 ]
[ 1.2195 +/- 0.0023 0.0899 +/- 0.0021 1.6908 +/- 0.0009 ]
Translation vectors (inches):
[ -13.4723 +/- 0.1108 3.9026 +/- 0.1451 75.4292 +/- 0.1327 ]
[ -14.9313 +/- 0.0919 -13.5842 +/- 0.1207 61.2792 +/- 0.1374 ]
[ 16.7684 +/- 0.0879 -12.4416 +/- 0.1169 59.5286 +/- 0.1415 ]
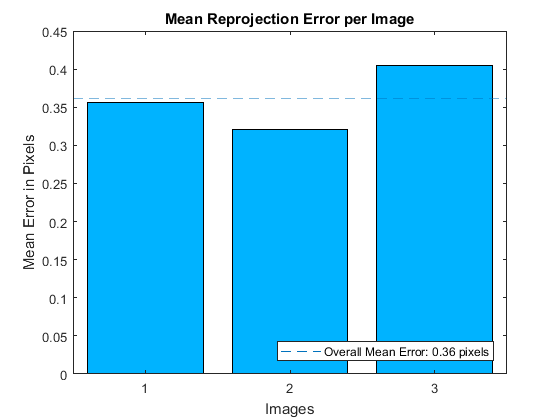
figure; showReprojectionErrors(cameraParams);
figure; showExtrinsics(cameraParams, 'CameraCentric');