script1
ext_calib test
Contents
% Color code for each image: colors = 'brgkcm'; %%%% % Show the extrinsic parameters if n_ima ~= 0, if ~exist('dX'), eval(['dX = norm(Tc_' num2str(ind_active(1)) ')/10;']); dY = dX; end; else dX = 1; end; fprintf('dX = %g\n',dX);
dX = 3
IP = 5*dX*[1 -alpha_c 0;0 1 0;0 0 1]*[1/fc(1) 0 0;0 1/fc(2) 0;0 0 1]*[1 0 -cc(1);0 1 -cc(2);0 0 1]*[0 nx-1 nx-1 0 0 ; 0 0 ny-1 ny-1 0;1 1 1 1 1];
IP
BASE = 5*dX*([0 1 0 0 0 0;0 0 0 1 0 0;0 0 0 0 0 1]);
IP = reshape([IP;BASE(:,1)*ones(1,5);IP],3,15);
fprintf('nx %d ny %d\n',nx,ny);
IP = -4.8850 5.0432 5.0432 -4.8850 -4.8850 -5.4762 -5.4762 4.4604 4.4604 -5.4762 15.0000 15.0000 15.0000 15.0000 15.0000 nx 640 ny 640
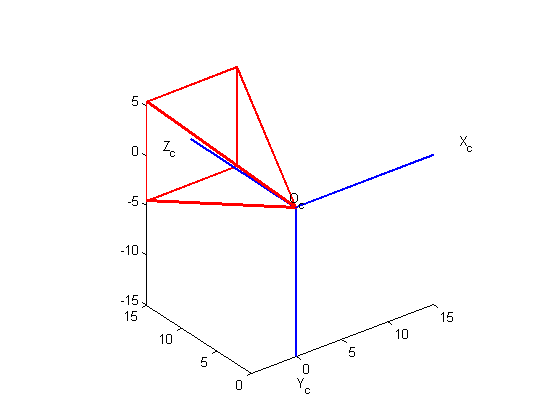
show camera
figure(4); plot3(BASE(1,:),BASE(3,:),-BASE(2,:),'b-','linewidth',2); hold on; plot3(IP(1,:),IP(3,:),-IP(2,:),'r-','linewidth',2); text(6*dX,0,0,'X_c'); text(-dX,5*dX,0,'Z_c'); text(0,0,-6*dX,'Y_c'); text(-dX,-dX,dX,'O_c'); hold off axis equal
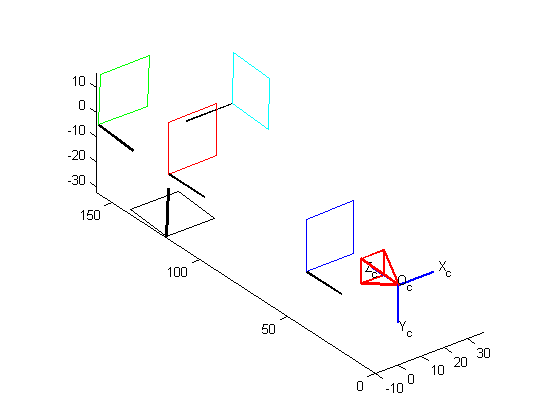
show targets
ndx = [1 8 64 57 1]; hold on for k = 1:5 eval(['Rk = Rc_' num2str(k) ';']); Rk eval(['Tk = Tc_' num2str(k) ';']); Tk eval(['Xb = X_' num2str(k) '(:,ndx);']); YY = Rk*Xb + Tk*ones(1,length(ndx)); plot3(YY(1,:),YY(3,:),-YY(2,:),colors(k)); fprintf('target %d z-axis %g %g %g\n',k,Rk(:,3)); zaxis(:,k) = Rk(:,3); YY = [zeros(3,1) 20*Rk(:,3)] + Tk*ones(1,2); plot3(YY(1,:),YY(3,:),-YY(2,:),'k','LineWidth',2); end hold off axis equal
Rk =
1.0000 -0.0000 0.0013
-0.0000 -1.0000 -0.0002
0.0013 0.0002 -1.0000
Tk =
-10.2678
9.1718
39.5355
target 1 z-axis 0.00133369 -0.000194632 -0.999999
Rk =
0.9999 -0.0002 0.0103
-0.0002 -1.0000 0.0053
0.0103 -0.0053 -0.9999
Tk =
-9.7864
6.5306
118.5877
target 2 z-axis 0.0102956 0.00531243 -0.999933
Rk =
0.9999 -0.0005 -0.0146
0.0003 -0.9985 0.0549
-0.0146 -0.0549 -0.9984
Tk =
-9.5427
5.1973
158.9634
target 3 z-axis -0.0146297 0.054913 -0.998384
Rk =
1.0000 0.0066 -0.0012
-0.0008 -0.0560 -0.9984
-0.0067 0.9984 -0.0560
Tk =
-9.7897
32.1206
119.8042
target 4 z-axis -0.00120952 -0.998429 -0.0560145
Rk =
-0.0093 -0.0057 -0.9999
0.0356 -0.9994 0.0054
-0.9993 -0.0355 0.0094
Tk =
36.9147
5.6694
143.1217
target 5 z-axis -0.999941 0.00535125 0.00944669
for k=1:5 for j=1:5 angles(k,j)= axis_angle(zaxis(:,k),zaxis(:,j)); end end angles
angles =
0 0.6027 3.2890 86.7779 90.6177
0.6027 0 3.1822 87.0942 91.1295
3.2890 3.1822 0 89.9361 89.6854
86.7779 87.0942 89.9361 0 90.2671
90.6177 91.1295 89.6854 90.2671 0