cube6
extract camera parameters from control points. The merit function is fval1.m
load view2 rgb = imread('view2.jpg'); sz = size(rgb); % normalize image coordinates to range [ -0.5 : 0.5 ] % (assuming square image) p = pts/sz(2) - 0.5; % starting point for optimization v = [-45 35 0 -3 -3 3 1 0 -1 0]; [vfit, fmin, exitflag, options] = fminsearch(@fval1,v,optimset('MaxFunEvals',4000),p); fprintf('%s\n',options.message); % show results vfit' fprintf('camera view angle: %g\n',atan(1/vfit(7))*180/pi); T = my_camera(vfit)
Optimization terminated:
the current x satisfies the termination criteria using OPTIONS.TolX of 1.000000e-004
and F(X) satisfies the convergence criteria using OPTIONS.TolFun of 1.000000e-004
ans =
-31.1054
28.9825
0.0009
-1.0475
-2.0857
2.0237
1.9177
0.0003
-1.9190
0.0003
camera view angle: 27.5403
T =
0.8562 -0.5166 -0.0000 -0.1806
0.2503 0.4149 0.8748 -0.6428
0.4519 0.7490 -0.4845 3.0161
show points on image
figure(1); imshow(rgb); idx = [1 2 4 5 6 7 8]; show_loc(vfit,idx,sz(2));

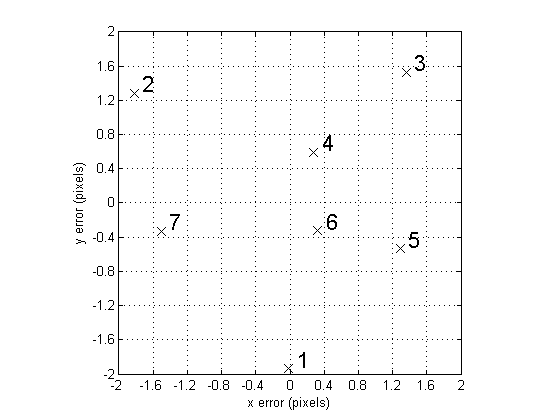
show errors
figure(2); show_errors(vfit,p,idx,sz(2),2);