flow1
Download MATLAB source: flow.zip.
% calculate the scene - a field of points clear close all xr = -20:20; yr = -20:60; x = ones(length(yr),1)*xr; y = yr'*ones(1,length(xr)); z = zeros(size(x)); disp('matrix size'); disp(size(x));
matrix size
81 41
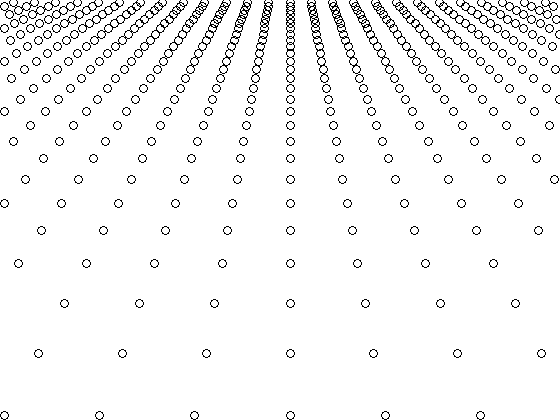
% draw the scene figure(1); plot3(x,y,z,'ko'); axis equal axis off camproj('perspective'); campos([0 -20 5]); camtarget([0 -10 0]); camva(30); pos = campos(); tgt = camtarget();
% move the camera delta = [0 0.2 0]; aviobj = avifile('flow2.avi','fps',20,'compression','Cinepak'); for k=1:101 campos(pos+(k-1)*delta); camtarget(tgt+(k-1)*delta); drawnow; F = getframe(gcf); aviobj = addframe(aviobj,F); end aviobj = close(aviobj);
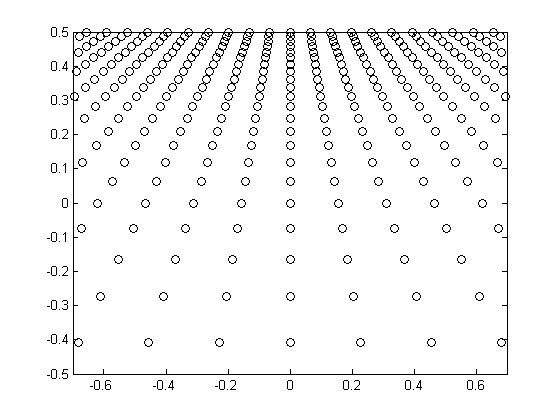
% do flow without MATLAB 3D graphpics figure(2) up = [0 0 1]; vn = pos - tgt; vz = vn/norm(vn); vx = cross(up,vz); vx = vx/norm(vx); vy = cross(vz,vx); R = [vx' vy' -vz']; T2 = [R -R*pos']; % test disp('transform target point:'); disp(T2*[tgt 1]') xp = x(:); yp = y(:); zp = z(:); xform = T2*[xp'; yp'; zp'; ones(size(zp'))]; va = 30; scl = 1/tan(va*pi/180); idx = find(xform(3,:)>0); % select points in front of camera xpts = xform(1,idx)./xform(3,idx)*scl; ypts = xform(2,idx)./xform(3,idx)*scl; plot(xpts,ypts,'ko'); axis([-0.7 0.7 -0.5 0.5]);
transform target point:
0
0
11.1803
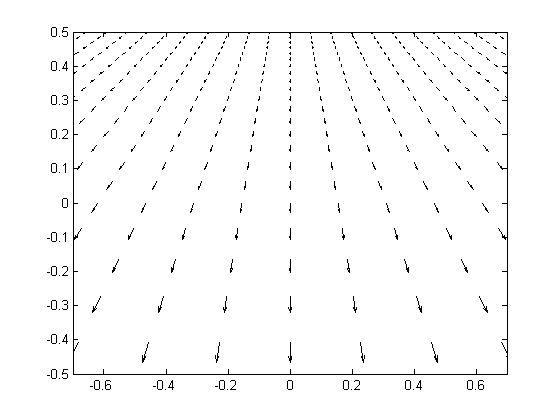
% traditional optical flow diagram yp = y(:) - 0.2; xform = T2*[xp'; yp'; zp'; ones(size(zp'))]; xnew = xform(1,idx)./xform(3,idx)*scl; ynew = xform(2,idx)./xform(3,idx)*scl; s = 80; quiver(xpts,ypts,xnew-xpts,ynew-ypts,5,'k'); axis([-0.7 0.7 -0.5 0.5]);