script4 (directed homography)
clear
close all
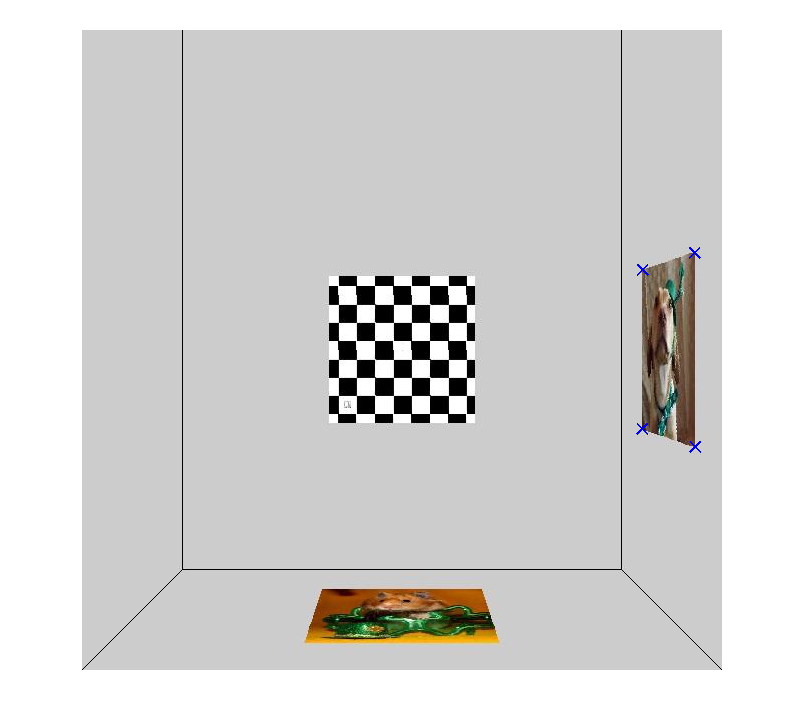
rgb = imread('mod_3.jpg');
imshow(rgb);
load script4c
pts = pts';
hold on
plot(pts(1,:),pts(2,:),'bx','MarkerSize',11,'LineWidth',2);
hold off
vi = [0 0 -1];
vk = [1 0 0];
vj = cross(vk,vi);
f = 879.2;
hpts = e2h(pts);
KK = [ f 0 320; 0 f 320; 0 0 1];
R = [vi; vj; vk]
T1 = R/KK;
cp = mean(pts,2);
newcp = h2e(T1*e2h(cp));
fprintf('camera position along wall: %g %g\n',-newcp*3);
M = [300 0 0; 0 300 0; 0 0 1]*[eye(2,2) -newcp ; 0 0 1];
T = M*T1;
newpts = h2e(T*hpts);
plot([newpts(1,:) newpts(1,1)],[newpts(2,:) newpts(2,1)],'k');
axis ij
axis equal
t = maketform('projective',T');
disp('t.tdata.T');
disp(t.tdata.T);
[U V] = tformfwd(t,pts(1,:),pts(2,:));
disp('[U; V] (from tformfwd)');
disp([U; V]);
R =
0 0 -1
0 1 0
1 0 0
camera position along wall: 9.87244 -0.00268002
t.tdata.T
1.1229 -0.0003 0.0011
0 0.3412 0
-659.3245 -109.0926 -0.3640
[U; V] (from tformfwd)
-108.8053 89.1538 87.3872 -106.1855
99.3992 99.0667 -99.0145 -99.4619
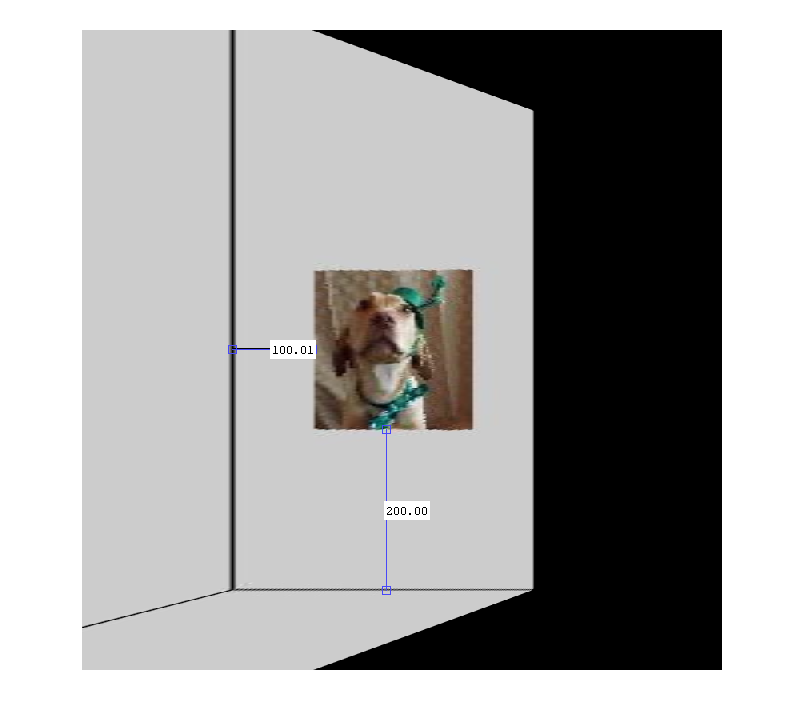
out = imtransform(rgb,t,'XData',[-400 400],'YData',[-400 400],'XYScale',1);
imshow(out);

tf = projective2d(T');
imageSize = [800 800];
xWorldLimits = [-400 400];
yWorldLimits = [-400 400];
RA = imref2d(imageSize,xWorldLimits,yWorldLimits);
[out, RB] = imwarp(rgb,tf,'OutputView',RA);
imshow(out);

imshow(out);
do_input = false;
if do_input
hd1 = imdistline;
hd2 = imdistline;
pause
pos1 = hd1.getPosition();
pos2 = hd2.getPosition();
load script4c
save script4c pts pos1 pos2
else
hd1 = imdistline(gca,pos1(:,1),pos1(:,2));
hd2 = imdistline(gca,pos2(:,1),pos2(:,2));
end