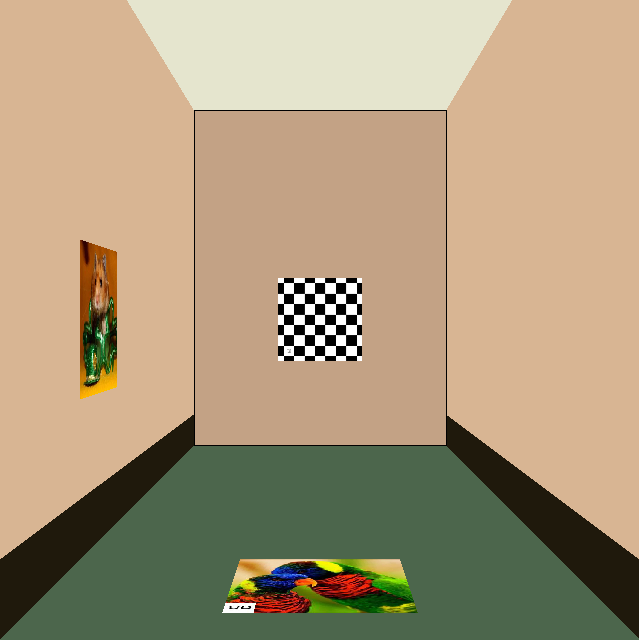
script5a (hallway model 4)
close all
clear
hallway;
g = imread('pat2s.jpg');
rgb = cat(3,g,g,g);
rgb = flipdim(rgb,1);
rgb2 = imread('vis4ud.jpg');
rgb2 = flipdim(rgb2,1);
N = 200;
[xdata zdata] = meshgrid(linspace(4,2,N),linspace(2,4,N));
ydata = zeros(size(xdata));
h(8) = surface(xdata,ydata,zdata,rgb,'FaceColor','texturemap','EdgeColor','none');
ydata = flipdim(zdata,1);
zdata = zeros(size(xdata));
h(9) = surface(xdata,ydata+8,zdata,rgb2,'FaceColor','texturemap','EdgeColor','none');
zdata = flipdim(ydata,1);
ydata = flipdim(xdata,2);
xdata = ones(size(xdata))*6;
rgb3 = imrotate(imread('img2.jpg'),180);
h(10) = surface(xdata,ydata+6,zdata,rgb3,'FaceColor','texturemap','EdgeColor','none');
campos([3 21 3]);
camtarget([3 0 3]);
camup([0 0 1]);
camproj('perspective');
camva(40);
set(gcf,'renderer','zbuffer')
axis equal
axis off
N = 640;
set(gcf,'Position',[100 100 N N]);
set(gca,'Position',[0 0 1 1]);
frame = getframe(gcf);
filename = 'script5a.jpg';
rgbx = frame.cdata;
imwrite(rgbx,filename);