See room
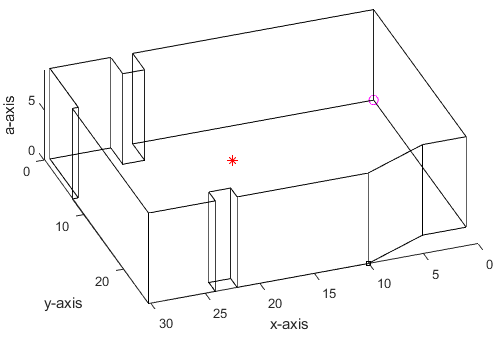
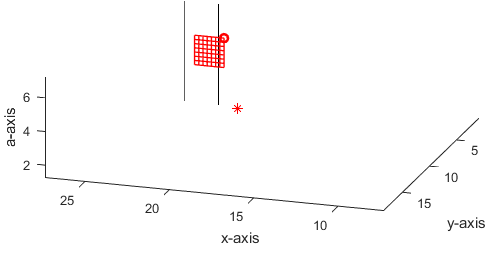
Below is a sketch of the room. The origin is marked at the front-left corner. The camera position is shown by the red asterisk.
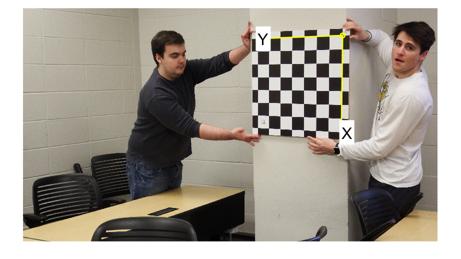
The following image4 from MATLAB calibrator shows the checkerboard axes.
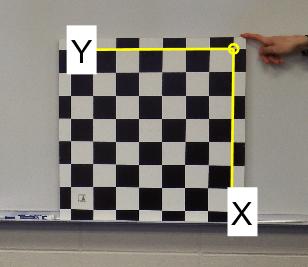
The image is located at the right wall. This means that the room x-axis is from left to right, the room y-axis is into the checkerboard, and the room z-axis is up. The checkerboard axes (relative to the room) are then shown by
R = [0 0 -1; -1 0 0; 0 1 0];
Note that det(R) = 1.
Tw is the location of the camera relative to the checkerboard coordinate system.
pos is the location of the camera relative to room coordinates. The location of
the checkerboard relative to the room is then
T = pos - Tw(4,:)*R;
If XX are the checkerboard worldPoints, we can calculate the corresponding
room coordinates from
YY = XX * R + ones(length(XX),1)*T;
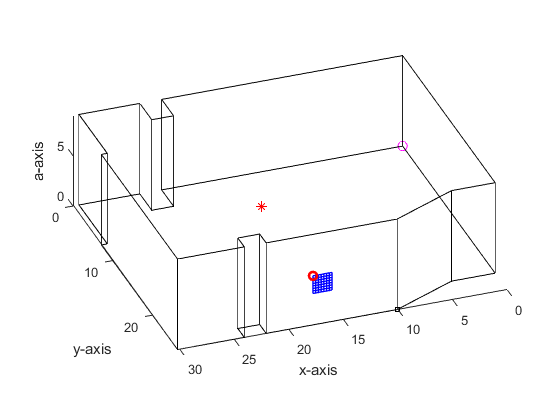
Here is the resulting display
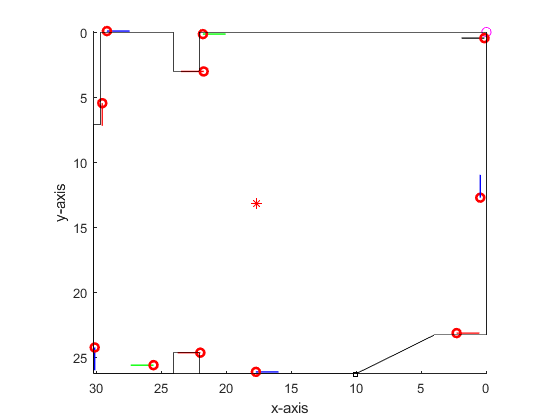
Following the same method for the other images gives us the following

Shifting to a top view gives an indication of how consistent the locations are
As an example, compare the original photo below to the reconstructed location.
Maintained by John Loomis, last updated 8 March 2020