fig4
Contents
close all
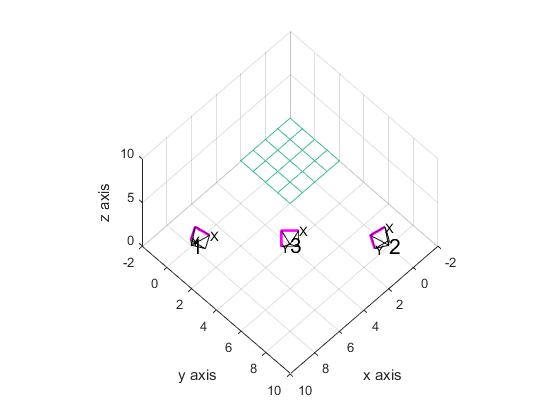
[xg, yg] = meshgrid(linspace(-2,2,5));
pt = [xg(:) yg(:) zeros(25,1)];
cam1.pos = [10 2 5];
cam1.target = [0 0 0];
scl = 0.5;
cam2.pos = [2 10 5];
cam2.target = [0 0 0];
cam3.pos = [8 8 10];
cam3.target = [0 0 0];
figure(1);
daspect([1 1 1]);
view(135,60);
ndx = [1:4 1];
hold on
mesh(xg,yg,zeros(5));
cam1 = cam_obj(cam1,scl);
text(cam1.pos(1),cam1.pos(2),cam1.pos(3),'1','FontSize',16);
cam2 = cam_obj(cam2,scl);
text(cam2.pos(1),cam2.pos(2),cam2.pos(3),'2','FontSize',16);
cam3 = cam_obj(cam3,scl);
text(cam3.pos(1),cam3.pos(2),cam3.pos(3),'3','FontSize',16);
hold off
grid;
axis equal
xlabel('x axis');
ylabel('y axis');
zlabel('z axis');
figure(2);
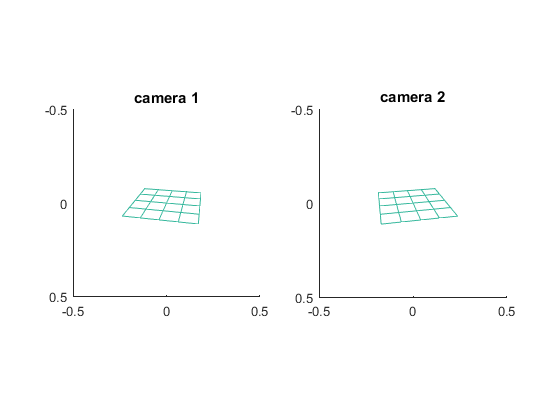
subplot(1,2,1);
[img1, invpt1] = cam_plot(cam1,pt,'g');
mesh(reshape(img1(:,1),[5 5]),reshape(img1(:,2),[5 5]),zeros(5));
axis([-scl scl -scl scl]);
axis square
axis ij
grid
title('camera 1');
subplot(1,2,2);
[img2, invpt2] = cam_plot(cam2,pt,'g');
mesh(reshape(img2(:,1),[5 5]),reshape(img2(:,2),[5 5]),zeros(5));
axis([-scl scl -scl scl]);
axis square
axis ij
grid
title('camera 2');
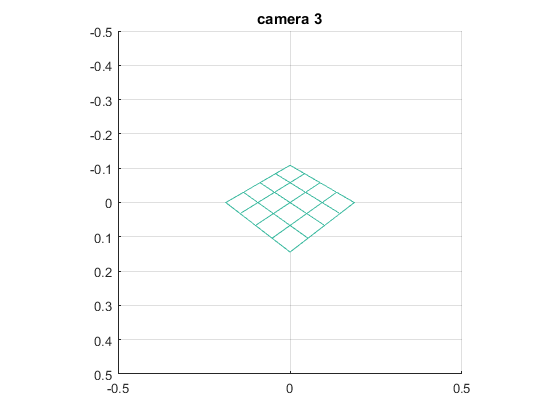
figure(3);
[img3, invpt3] = cam_plot(cam3,pt,'k');
mesh(reshape(img3(:,1),[5 5]),reshape(img3(:,2),[5 5]),zeros(5));
axis([-scl scl -scl scl]);
axis square
axis ij
grid on
title('camera 3');
clear imagePoints
imagePoints(:,:,1) = img1;
imagePoints(:,:,2) = img2;
imagePoints(:,:,3) = img3;
worldPoints = pt(:,1:2);
Calibrate the camera
[cameraParams, imagesUsed, estimationErrors] = estimateCameraParameters(imagePoints, worldPoints, ...
'EstimateSkew', false, 'EstimateTangentialDistortion', false, ...
'NumRadialDistortionCoefficients', 2, 'WorldUnits', 'in', ...
'InitialIntrinsicMatrix', eye(3), 'InitialRadialDistortion', []);
cameraParams
save params cameraParams imagePoints worldPoints
Warning: Matrix is singular to working precision.
cameraParams =
cameraParameters with properties:
Camera Intrinsics
IntrinsicMatrix: [3x3 double]
FocalLength: [1 1]
PrincipalPoint: [0 0]
Skew: 0
Lens Distortion
RadialDistortion: [0 0]
TangentialDistortion: [0 0]
Camera Extrinsics
RotationMatrices: [3x3x3 double]
TranslationVectors: [3x3 double]
Accuracy of Estimation
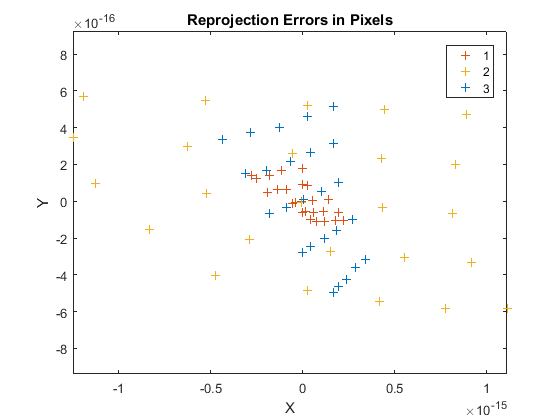
MeanReprojectionError: 3.9643e-16
ReprojectionErrors: [25x2x3 double]
ReprojectedPoints: [25x2x3 double]
Calibration Settings
NumPatterns: 3
WorldPoints: [25x2 double]
WorldUnits: 'in'
EstimateSkew: 0
NumRadialDistortionCoefficients: 2
EstimateTangentialDistortion: 0
figure; showReprojectionErrors(cameraParams, 'ScatterPlot');
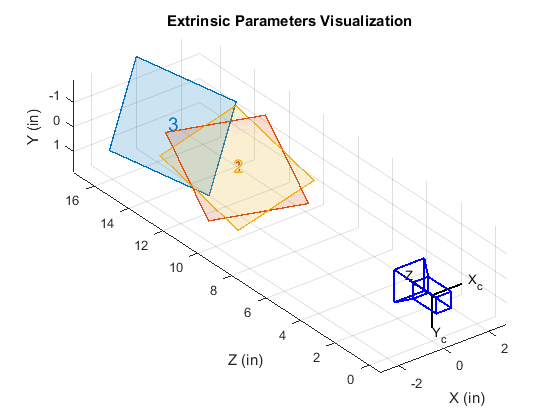
Visualize pattern locations
figure; showExtrinsics(cameraParams, 'CameraCentric');
R = cameraParams.RotationMatrices(:,:,1)
Tv = cameraParams.TranslationVectors(1,:)
disp('cam1.T''')
disp(cam1.T')
disp('cam1.Tinv');
disp(cam1.Tinv);
R =
-0.1961 0.4317 -0.8805
0.9806 0.0863 -0.1761
-0.0000 -0.8979 -0.4402
Tv =
0.0000 -0.0000 11.3578
cam1.T'
-0.1961 0.4317 -0.8805
0.9806 0.0863 -0.1761
0 -0.8979 -0.4402
0.0000 0 11.3578
cam1.Tinv
-0.1961 0.4317 -0.8805 10.0000
0.9806 0.0863 -0.1761 2.0000
0 -0.8979 -0.4402 5.0000
test
Tr = [R [0; 0; 0];Tv 1];
inv(Tr)
ans =
-0.1961 0.9806 -0.0000 0
0.4317 0.0863 -0.8979 0
-0.8805 -0.1761 -0.4402 0
10.0000 2.0000 5.0000 1.0000