test1
clear
close all
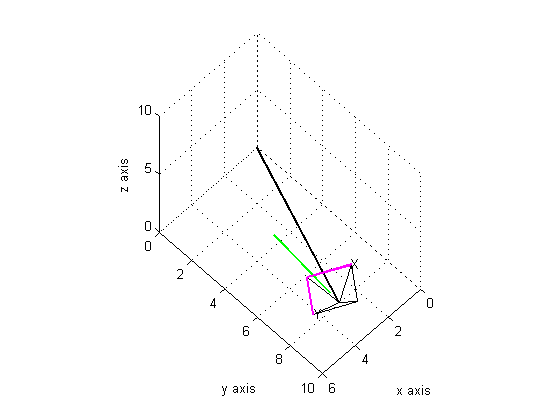
cam.pos = [5 10 5];
cam.target = [0 0 0];
cam.va = 30;
figure(1);
daspect([1 1 1]);
view(135,60);
grid
hold on;
scl = 1.0;
out = cam_obj(cam,scl);
pos = cam.pos;
tgt = cam.target;
plot3([pos(1) tgt(1)],[pos(2) tgt(2)],[pos(3) tgt(3)],'k','LineWidth',2);
obj = [3 4 1];
img = out.T*[obj 1]';
imgpt = [img(1)/img(3) img(2)/img(3) 1 1]
invpt = out.Tinv*imgpt';
plot3([obj(1) invpt(1)],[obj(2) invpt(2)],[obj(3) invpt(3)],'g','LineWidth',2);
xlabel('x axis');
ylabel('y axis');
zlabel('z axis');
hold off
imgpt =
-0.1217 0.1491 1.0000 1.0000