script5
clear
close all
pos1 = [1 17 3];
target1 = [4 0 3];
pos2 = [5 17 3];
target2 = [2 0 3];
cam1 = camobj(pos1,target1);
cam2 = camobj(pos2,target2);
vcube = [ 0 0 0; 1 0 0; 1 1 0; 0 1 0; 0 0 1; 1 0 1; 1 1 1; 0 1 1]';
idx = [1 2 3 4 1 5 6 7 8 5 6 2 3 7 8 4];
vert(1,:) = vcube(1,:)*6;
vert(2,:) = vcube(2,:)*90;
vert(3,:) = vcube(3,:)*8;
x = vert(1,idx);
y = vert(2,idx);
z = vert(3,idx);
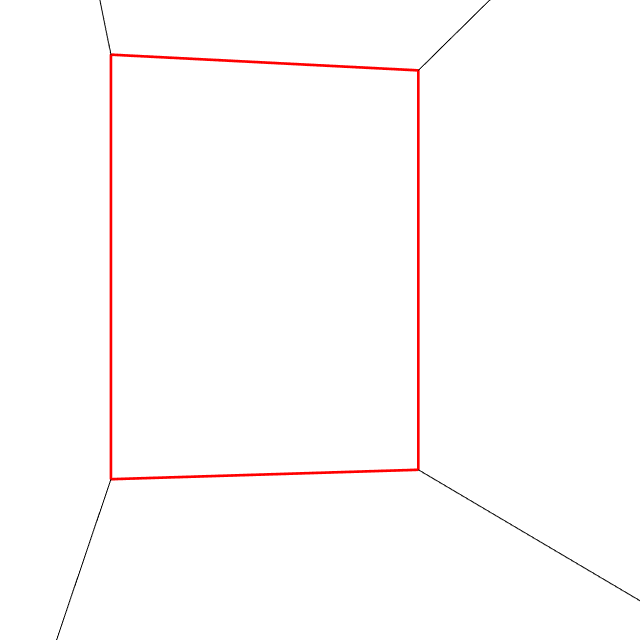
plot3(x,y,z,'k-');
hold on
ndx = [1 2 6 5 1];
x = vert(1,ndx);
y = vert(2,ndx);
z = vert(3,ndx);
plot3(x,y,z,'r-','LineWidth',2);
hold off
campos(pos2);
camtarget(target2);
camup([0 0 1]);
camproj('perspective');
camva(40);
set(gcf,'renderer','zbuffer')
axis equal
axis off
NPIX = 640;
set(gcf,'Position',[100 100 NPIX NPIX]);
set(gca,'Position',[0 0 1 1]);
f = getframe(gcf);
rgb = f.cdata;
pts = [x; y; z];
ipts = h2e(cam2.KK*cam2.T*e2h(pts));
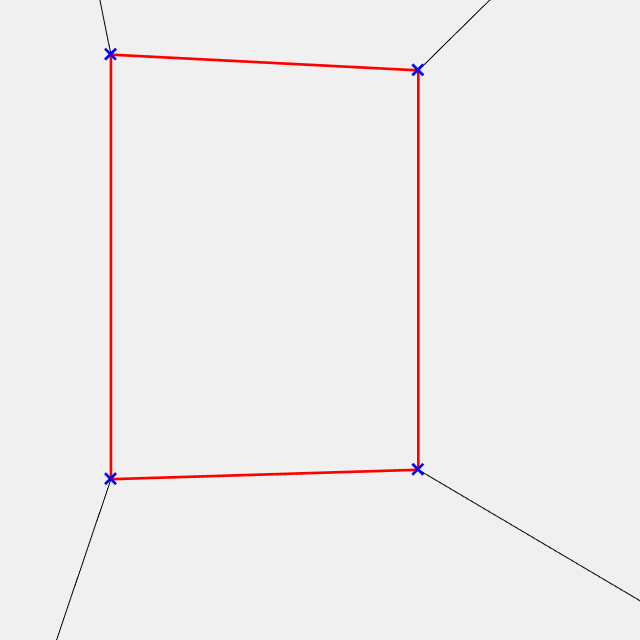
imshow(rgb);
hold on
plot(ipts(1,:),ipts(2,:),'bx','MarkerSize',11,'LineWidth',2);
hold off
axis ij
T1 = [cam1.T; 0 0 0 1]
T2 = [cam2.T; 0 0 0 1]
inv(T1)
inv(T2)
T1 =
-0.9848 -0.1738 0 3.9391
0 0 -1.0000 3.0000
0.1738 -0.9848 0 16.5675
0 0 0 1.0000
T2 =
-0.9848 0.1738 0 1.9696
0 0 -1.0000 3.0000
-0.1738 -0.9848 0 17.6102
0 0 0 1.0000
ans =
-0.9848 0 0.1738 1.0000
-0.1738 0 -0.9848 17.0000
0 -1.0000 0 3.0000
0 0 0 1.0000
ans =
-0.9848 0 -0.1738 5.0000
0.1738 0 -0.9848 17.0000
0 -1.0000 0 3.0000
0 0 0 1.0000