script3
Contents
load data and calc extrinsics
clear
close all
load cpts
load mpts
load CalibResults
worldPoints = [ 0 0; 21 0; 21 21; 0 21];
[R1, T1] = extrinsics(cpts1(1:4,:),worldPoints,cameraParams)
[R2, T2] = extrinsics(cpts2(1:4,:),worldPoints,cameraParams)
R1 =
0.9689 -0.1280 0.2119
0.2475 0.5028 -0.8282
-0.0006 0.8549 0.5188
T1 =
-11.7182 -3.6801 62.2700
R2 =
0.9994 0.0097 0.0336
0.0245 0.4898 -0.8715
-0.0249 0.8718 0.4892
T2 =
-9.8666 -5.8465 69.8490
camera origins
C1 = -T1*R1'
C2 = -T2*R2'
C1 =
-2.3130 56.3234 -29.1674
C2 =
7.5710 63.9797 -29.3205
intrinsic matrix
fc = cameraParams.FocalLength;
cc = cameraParams.PrincipalPoint;
K = [fc(1) 0 cc(1); 0 fc(2) cc(2); 0 0 1]'
Kinv = inv(K);
K =
1.0e+03 *
6.5846 0 0
0 6.5845 0
2.4149 1.3354 0.0010
find projections
fprintf('\n');
npts = size(mpts1,1);
for n=1:24
k1c = [mpts1(n,:) 1]*Kinv;
k2c = [mpts2(n,:) 1]*Kinv;
k1 = k1c*R1';
k2 = k2c*R2';
b = [ dot(C2-C1,k1); -dot(C2-C1,k2)];
A = [dot(k1,k1) -dot(k1,k2); -dot(k1,k2) dot(k2,k2)];
q = A\b;
pA = C1+k1*q(1);
pB = C2+k2*q(2);
fprintf('%d \t %8.4f \t %8.4f \t %8.4f \t %10.6f\n',n,pA,norm(pA-pB));
end
1 0.0376 0.0964 -0.0445 0.016820
2 12.0349 -0.1212 0.0089 0.037869
3 18.0212 0.0188 -0.0394 0.045440
4 21.0029 0.0430 -0.0117 0.036953
5 16.1952 9.5454 -4.3385 0.060603
6 18.2264 11.3593 -4.2453 0.101709
7 17.2113 12.4221 -4.2053 0.172738
8 15.1509 10.6362 -4.2190 0.103872
9 20.9907 6.0088 -0.0576 0.008074
10 14.9952 3.0495 -0.0935 0.014603
11 3.6613 10.4836 -8.4072 0.145389
12 9.2969 7.9869 -8.4556 0.075145
13 8.5654 5.3840 -8.2224 0.066653
14 2.6853 8.1530 -8.2529 0.094310
15 3.8368 10.6246 0.0571 0.077957
16 6.0456 11.6619 0.0692 0.047538
17 17.1893 12.5572 -0.1299 0.068494
18 15.0576 11.7822 0.0384 0.057565
19 18.0613 11.8249 0.0021 0.062212
20 20.9720 20.8766 -0.0762 0.104300
21 18.0468 20.8451 -0.0576 0.118973
22 15.0862 20.6588 0.0546 0.123564
23 3.0491 20.7005 -0.0031 0.151537
24 0.0571 20.5331 0.1215 0.140688
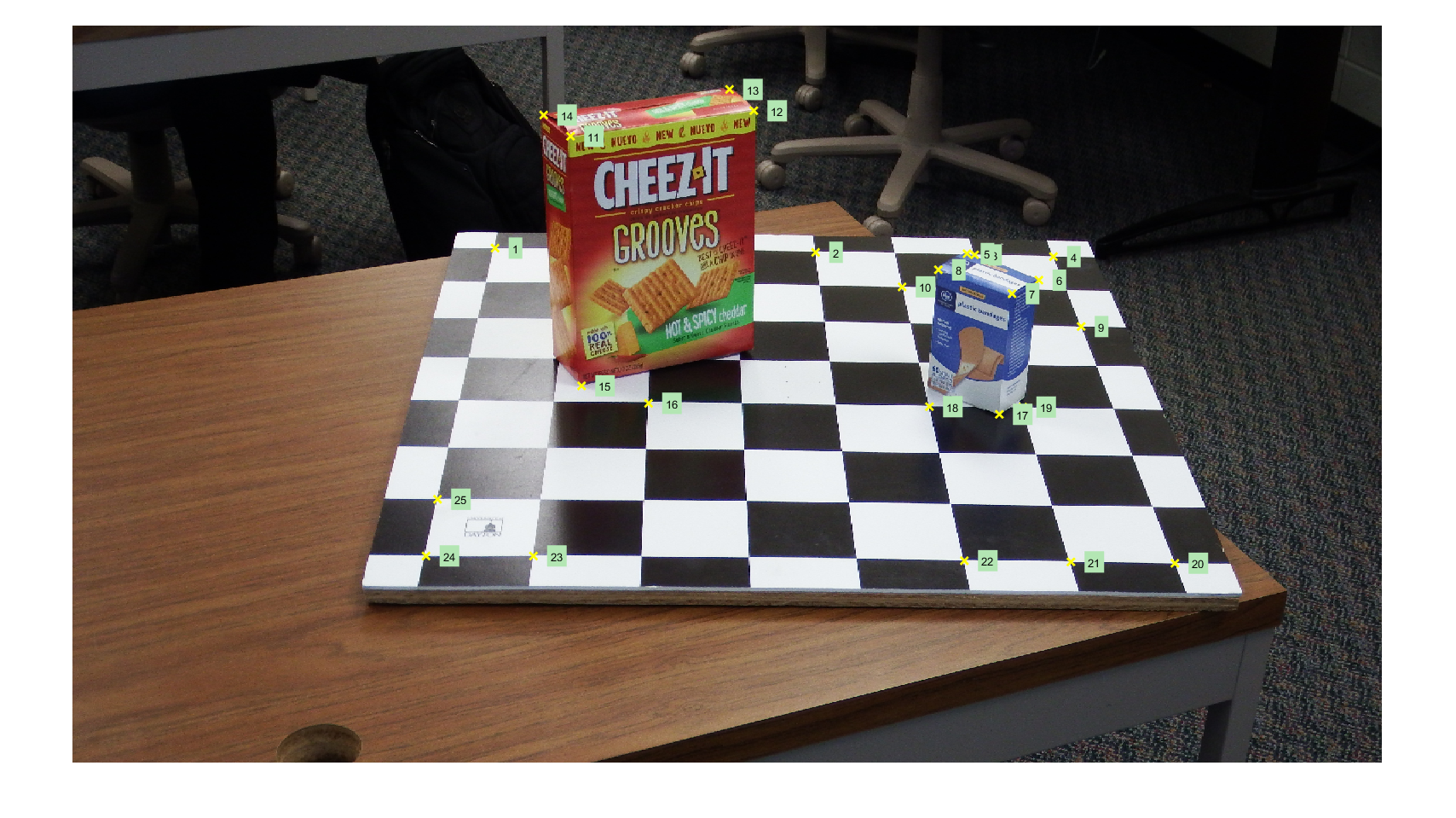
figure(1)
rgb = imread(files{1});
show_points(rgb,mpts1);
Warning: Image is too big to fit on screen; displaying at 33%

figure(2)
rgb = imread(files{2});
show_points(rgb,mpts2);
Warning: Image is too big to fit on screen; displaying at 33%