script5
Contents
clear
close all
load cpts
load mpts
load CalibResults
load Fmatrix
intrinsic matrix
fc = cameraParams.FocalLength;
cc = cameraParams.PrincipalPoint;
K = [fc(1) 0 cc(1); 0 fc(2) cc(2); 0 0 1];
Kinv = inv(K);
extrinsic matrices
worldPoints = [ 0 0 ; 21 0 ; 21 21 ; 0 21 ];
[R1, T1] = extrinsics(cpts1(1:4,:),worldPoints,cameraParams)
[R2, T2] = extrinsics(cpts2(1:4,:),worldPoints,cameraParams)
R1 =
0.9689 -0.1280 0.2119
0.2475 0.5028 -0.8282
-0.0006 0.8549 0.5188
T1 =
-11.7182 -3.6801 62.2700
R2 =
0.9994 0.0097 0.0336
0.0245 0.4898 -0.8715
-0.0249 0.8718 0.4892
T2 =
-9.8666 -5.8465 69.8490
verify basic equations
C1 = -T1*R1';
C2 = -T2*R2';
w = [worldPoints(1,:) 0];
c1 = w*R1+T1;
c1n = c1/c1(3)
c2 = w*R2+T2;
c2n = c2/c2(3)
c1n =
-0.1882 -0.0591 1.0000
c2n =
-0.1413 -0.0837 1.0000
calculate essential matrix
k1 = c1n*R1';
k2 = c2n*R2';
T = C2 - C1;
Sk = [0 -T(3) T(2); T(3) 0 -T(1); -T(2) T(1) 0];
E = R2'*Sk*R1
test = c2n*E*c1n'
E =
0.1537 6.2632 3.9604
-4.4035 1.1219 -11.0412
-2.3066 10.4799 -0.1720
test =
1.6653e-16
calculate fundamental matrix
x1 = c1n*K'
x2 = c2n*K'
Fc = inv(K')*E*inv(K);
Fc = Fc/Fc(3,3)
test2 = x2*Fc*x1'
x1 =
1.0e+03 *
1.1757 0.9463 0.0010
x2 =
1.0e+03 *
1.4847 0.7842 0.0010
Fc =
-0.0000 -0.0000 -0.0009
0.0000 -0.0000 0.0032
0.0005 -0.0026 1.0000
test2 =
4.4409e-16
figure(1)
rgb1 = imread(files{1});
show_points(rgb1,mpts1);
Warning: Image is too big to fit on screen; displaying at 33%

xnull = null(F')
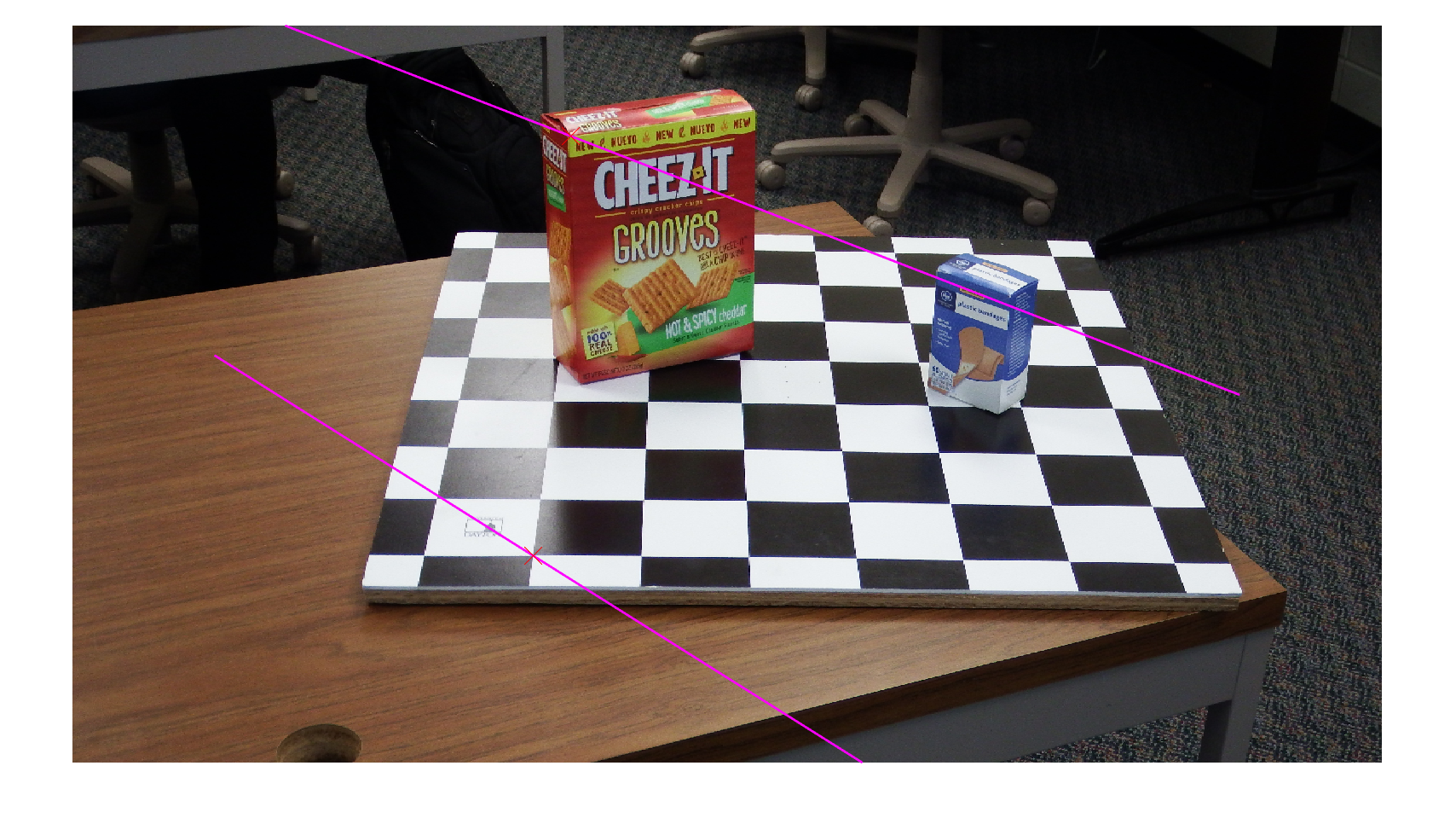
figure(2)
rgb2 = imread(files{2});
imshow(rgb2);
sz = size(rgb2);
m = 0;
for n=[11 23]
xA = [mpts1(n,:) 1];
J = F*xA';
m = m+1;
M(m,:) = J;
k = [-J(2) J(1)];
k = k/norm(k);
hold on
x = [500 sz(2)-500];
y = (-x*J(1)-J(3))/J(2);
plot(x,y,'m','LineWidth',2);
plot(mpts2(n,1),mpts2(n,2),'rx','MarkerSize',21);
hold off
end
xnull =
0.9125
0.4090
-0.0002
Warning: Image is too big to fit on screen; displaying at 33%
format shortg
pt = -M(1:2,1:2)\M(1:2,3);
fprintf('epipole from intersection of two lines %g %g\n',pt);
pn = xnull/xnull(3);
fprintf('epipole from null matrix %g %g\n',pn(1:2));
[isIn,epipole] = isEpipoleInImage(F', size(rgb1))
format
epipole from intersection of two lines -4695.19 -2104.4
epipole from null matrix -4695.19 -2104.4
isIn =
0
epipole =
-4695.2 -2104.4
epiLines = epipolarLine(F, mpts1(11,:));
points = lineToBorderPoints(epiLines, size(rgb2));
imshow(rgb2);
hold on
plot(mpts2(11,1),mpts2(11,2),'yo','MarkerSize',11);
line(points(:, [1,3])', points(:, [2,4])');
hold off
