ECE 564 Computer Vision Assignment 4
Submit HTML documentation on Isidore. Include MATLAB files needed
to reproduce your published MATLAB.
Use the images taken in class 5 Feb 2020 (available from Isidore resources as CV2020-02-05.zip)
but do not include them in your submission. I have enough copies.
- Use the images from
CV2020-02-05 to calibrate the camera.
Use both the MATLAB cameraCalibrator and Bouguet calibrator. Generate an
html script that publishes the results without re-running the calibration. Compare the results
of the two calibrators. See examples for Bouguet
and Vision toolkit
- Use the results of MATLAB calibrator to find the location of the camera in the room from the Extrinsics
for the target boards from the two walls and floor. Use images shown below. See example for a crucial formula.



- Use the images from your phone to calibrate its camera.
- The Bouguet calibrator function rodrigues.m has some
hidden code to test the function. Extract this hidden code and use it as part of a test function
using published MATLAB principles to demonstrate the use and accuracy of the function.
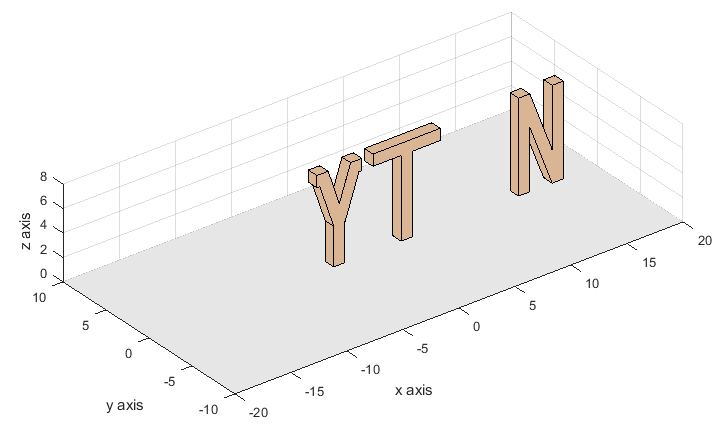
- Finish spelling out the word DAYTON and add the word OHIO. Your work from the previous
assignment is in letters.zip. I have demonstrated the easy letters, as shown
below.
Maintained by John Loomis,
last updated 19 February 2018