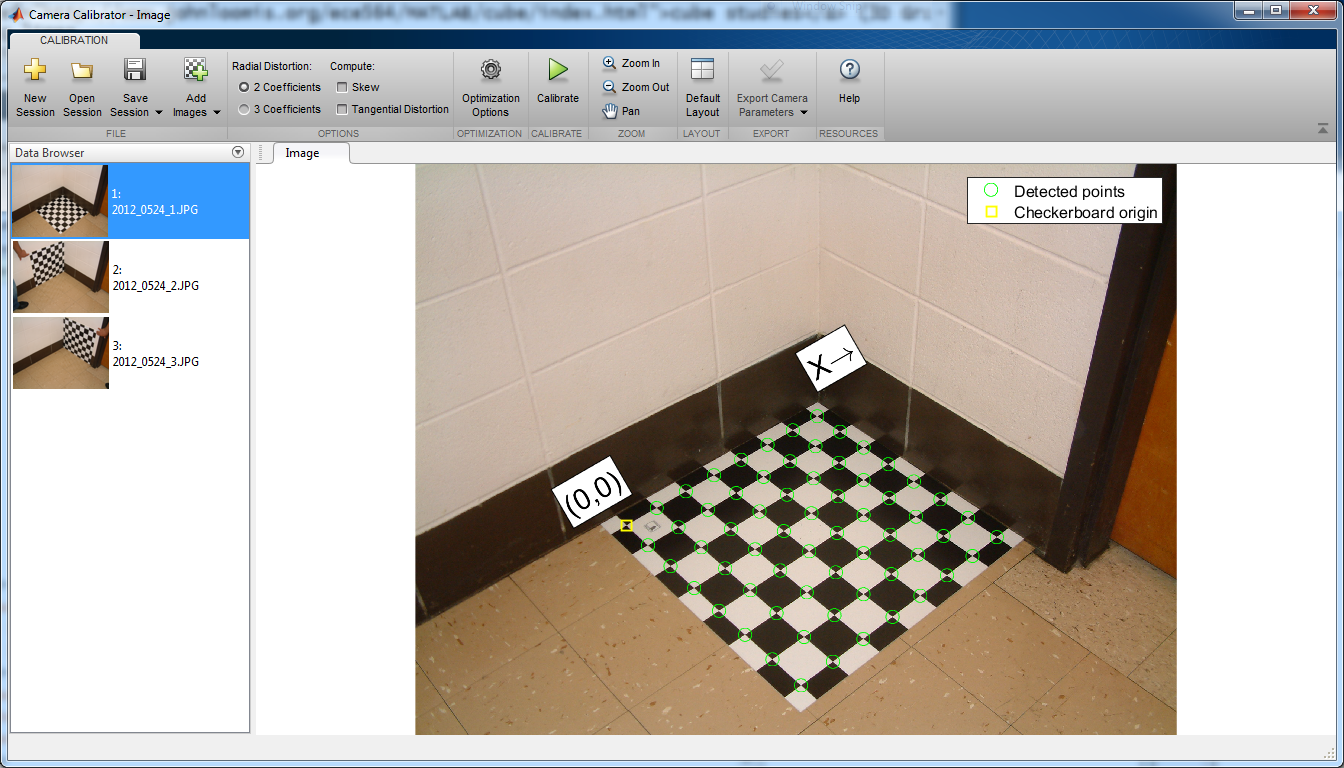
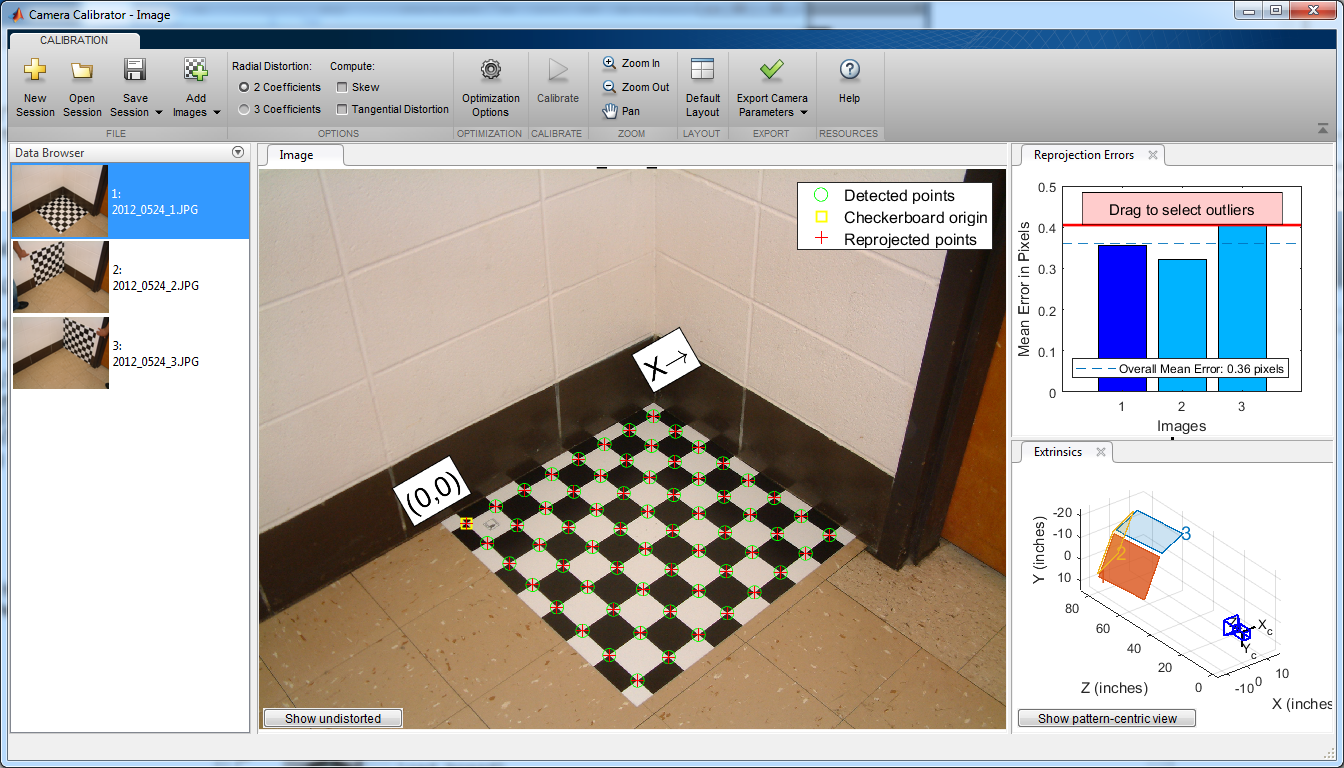
cameraCalibrator from MATLAB.
session1.mat)
autoPublish.m
get_board.m to generate board1.mat
autoPub2.m to publish calibration results
without regenerating checkerboard data.
Download images and MATLAB files (from CamCalib1.zip)
cameraCalibrator from MATLAB.
session1.mat)
autoPublish.m
get_board.m to generate board1.mat
autoPub2.m to publish calibration results
without regenerating checkerboard data.
Maintained by John Loomis, last updated 10 Feb 2019