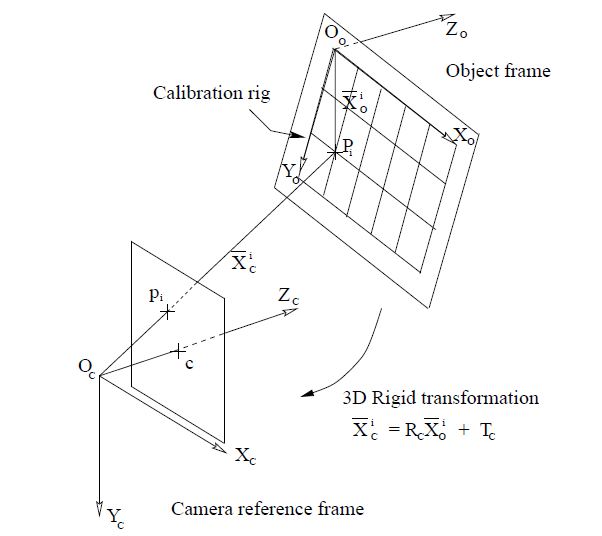
The camera-frame coordinates Xc of a point in target or
object-frame coordinates Xo is given by a rigid-body rotation
and translation
Xc =
Rc·Xo + Tc
where Rc and Tc
define the pose of the calibration rig with respect to the camera frame.
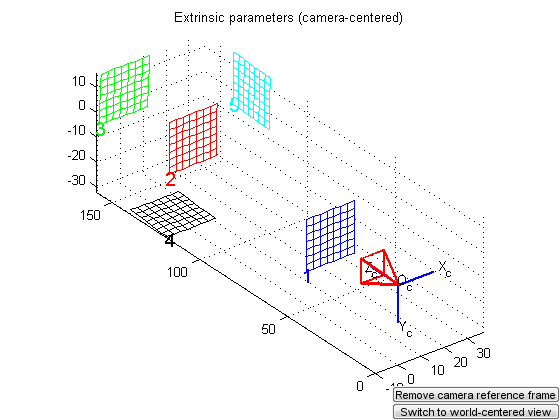
The calibration toolbox routines for displaying extrinsic calibration
data are ext_calib.m (camera centered) and ext_calib2.m
(target centered).
ext_calib
script1 (generates target normals)
axis_angle, calculates
angle in degrees between two unit-length axes.
The toolbox routine extrinsic_computation.m
computes the extrinsic parameters from an image of a target pattern.
The intrinsic camera parameters are assumed to be known (previously computed).
Maintained by John Loomis, last updated 2 April 2013